DeFM: New Depth Foundation Model for Robotics скачать в хорошем качестве
DeFM: New Depth Foundation Model for Robotics
13 часов назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: DeFM: New Depth Foundation Model for Robotics в качестве 4k
У нас вы можете посмотреть бесплатно DeFM: New Depth Foundation Model for Robotics или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон DeFM: New Depth Foundation Model for Robotics в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
DeFM: New Depth Foundation Model for Robotics
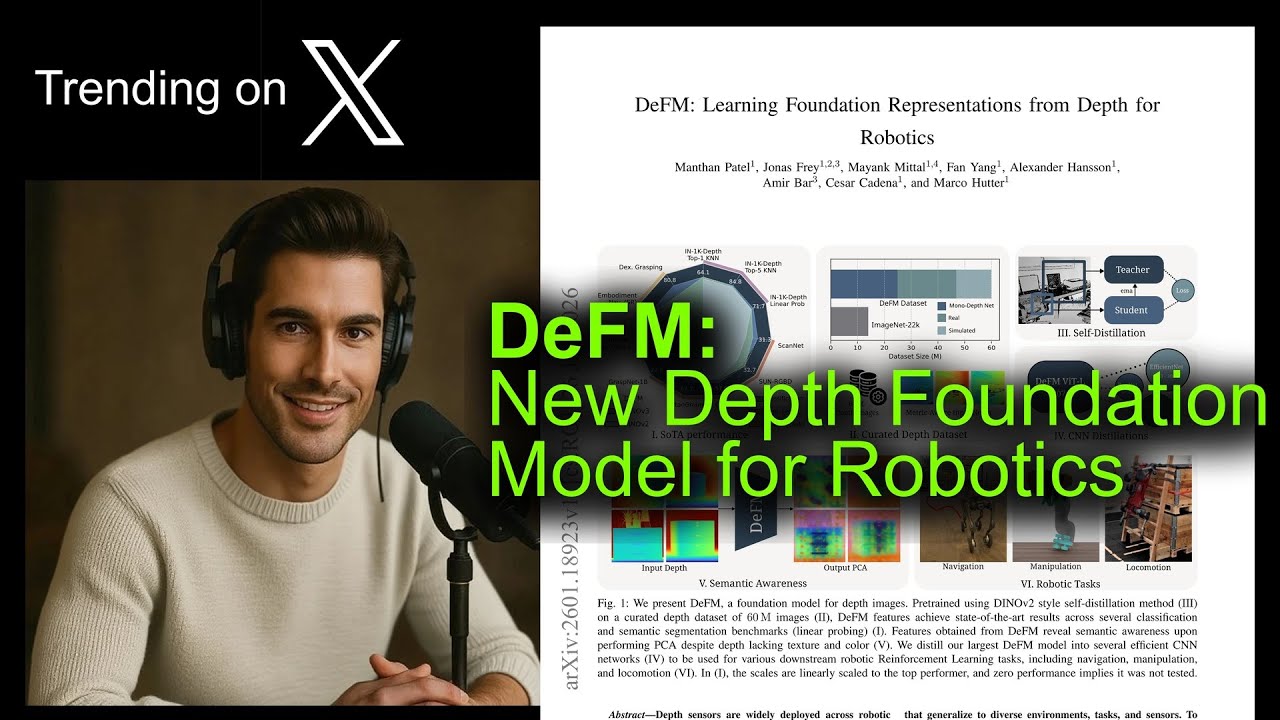
In this AI Research Roundup episode, Alex discusses the paper: 'DeFM: Learning Foundation Representations from Depth for Robotics' DeFM is a self-supervised foundation model trained on a massive dataset of 60 million depth images specifically for robotic applications. By utilizing a self-distillation objective, the model learns geometric and semantic representations that generalize across different sensors and environments. The researchers introduced a unique input normalization strategy to maintain metric awareness, which is crucial for precise physical interactions. The project also offers compact versions of the model, making it suitable for deployment on resource-constrained robotic hardware. It achieves state-of-the-art results in tasks like navigation and manipulation while demonstrating impressive zero-shot transfer from simulation to reality. Paper URL: https://arxiv.org/pdf/2601.18923 #AI #MachineLearning #DeepLearning #Robotics #ComputerVision #DepthSensing #FoundationModels Resources: GitHub: https://github.com/leggedrobotics/defm
Comments











![Почему работает теория шести рукопожатий? [Veritasium]](https://imager.clipsaver.ru/ggI1xKzoANs/max.jpg)






