Force-driven control of a cart transporter robot using indirect torque readings from its KELO drives скачать в хорошем качестве
Force-driven control of a cart transporter robot using indirect torque readings from its KELO drives
8 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Force-driven control of a cart transporter robot using indirect torque readings from its KELO drives в качестве 4k
У нас вы можете посмотреть бесплатно Force-driven control of a cart transporter robot using indirect torque readings from its KELO drives или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Force-driven control of a cart transporter robot using indirect torque readings from its KELO drives в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
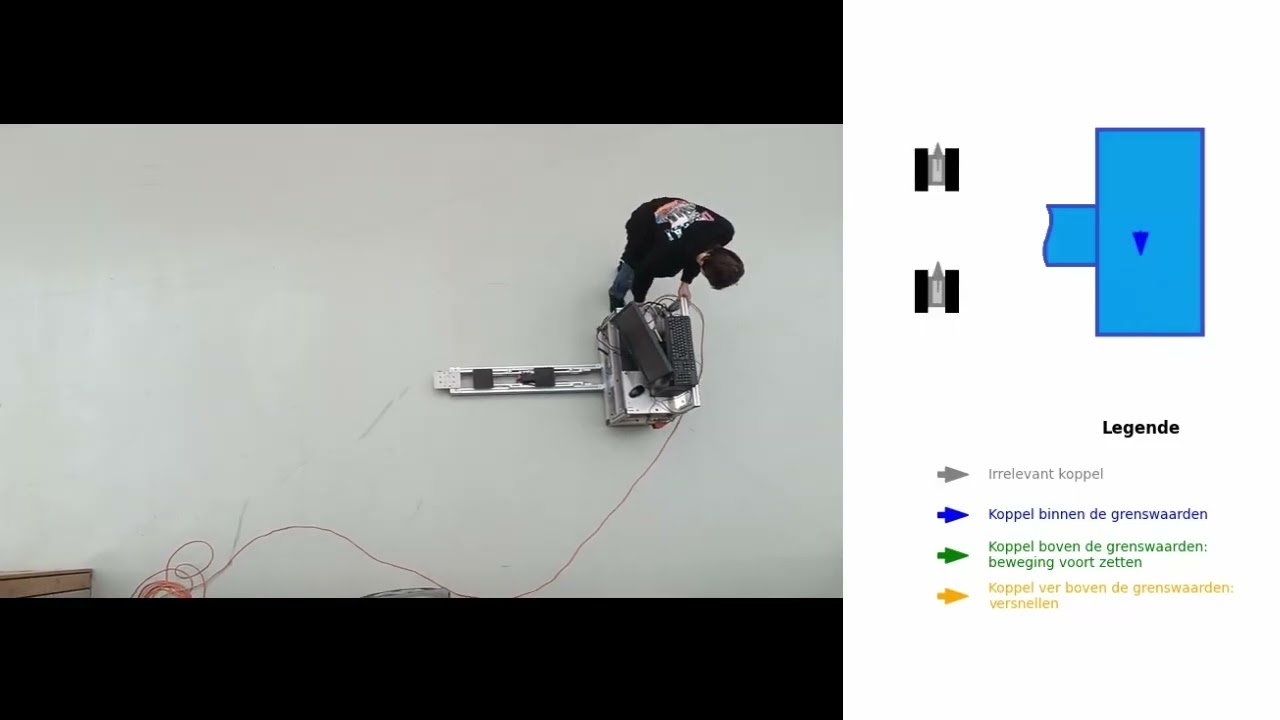
Force-driven control of a cart transporter robot using indirect torque readings from its KELO drives
This research was carried out as part of the following master's project: Authors: Bram Deboel, Stijn Loix Supervisors: Eric Demeester, Jan Kempeneers, David De Schepper, Martijn Cramer EN: Design and force-driven control of a mobile manipulator for automating production tasks at various workstations. NL: Ontwerp en krachtgedreven aansturing van een mobiele manipulator voor het automatiseren van productietaken aan verschillende werkstations.
Comments

















![Эффект Джанибекова [Veritasium]](https://imager.clipsaver.ru/N9HlQ-XVnFk/max.jpg)