Complementary Filter Sensor Fusion between Accelerometer and Gyroscope to estimate Pitch and Roll скачать в хорошем качестве
Complementary Filter Sensor Fusion between Accelerometer and Gyroscope to estimate Pitch and Roll
3 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Complementary Filter Sensor Fusion between Accelerometer and Gyroscope to estimate Pitch and Roll в качестве 4k
У нас вы можете посмотреть бесплатно Complementary Filter Sensor Fusion between Accelerometer and Gyroscope to estimate Pitch and Roll или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Complementary Filter Sensor Fusion between Accelerometer and Gyroscope to estimate Pitch and Roll в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Complementary Filter Sensor Fusion between Accelerometer and Gyroscope to estimate Pitch and Roll
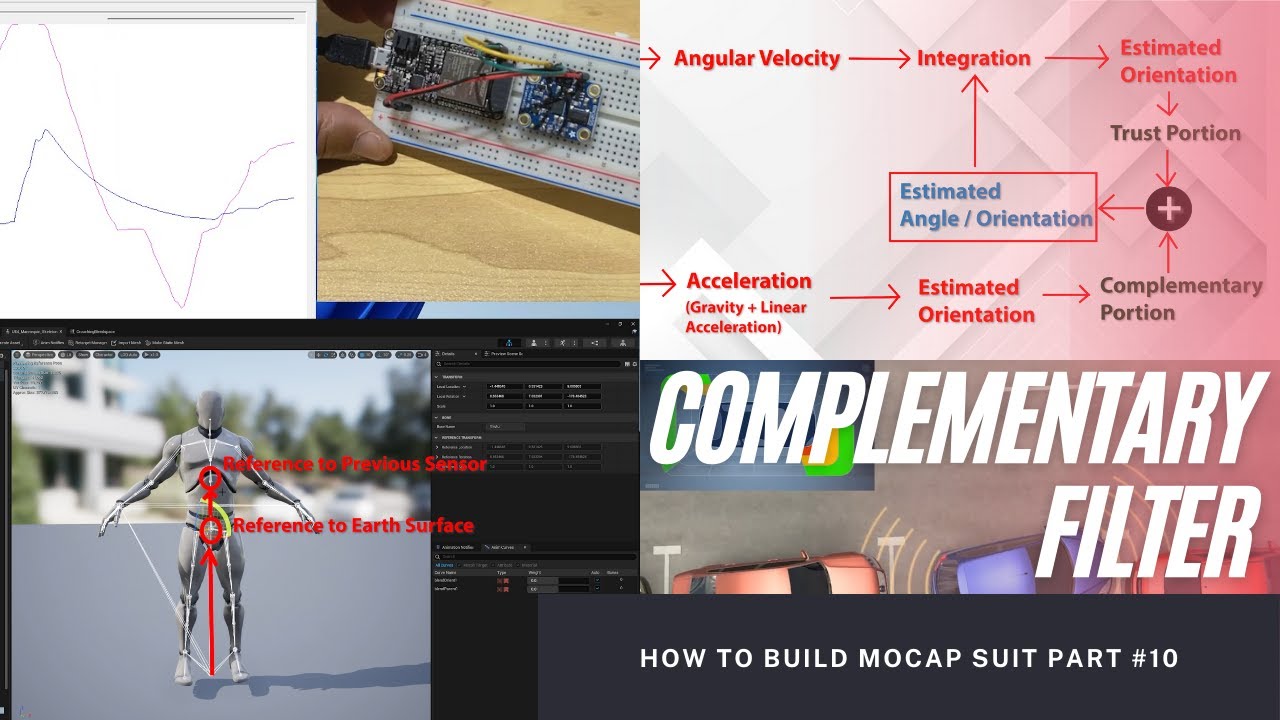
Mocap Suit Building Part 10 In this video, I have explained complementary filter sensor fusion using accelerometer raw data and gyroscope angular velocity. I have implemented the logic in the ESP32 Arduino board. Based on multiple trust percentage 50, 75 95 and 98 I have tuned my complementary filter to 95%. Finally, I have explained how low pass filter is used in complementary filter. While explained I have shown the difference of evaluation between continuous domain implementation and discrete domain implementation and how both of them are similar. In the next episode, I will determine the Yaw using magnetometer, fusing it with accelerometer by building a DCM (direction cosine matrix). This post detailed writeup: / 63103835 Important Information: Accelerometer: • Accelerometer Explained - simplified | How... and Sourcecode: / 61214703 Gyroscope: • Basic principles behind Gyroscope | How gy... (Part1) and / 62003316 (sourcecode), • Gyroscope | Rigidity in Space and Precessi... (Part2) and / 62369320 (sourcecode) Low Pass Filter: • Understanding Low Pass Filter to attenuate... and / 61781469 (sourcecode) Sensor Fusion: • A brief understanding of Sensor Fusion and... and / 62675791 (Detail writeup) Special Thanks to: Brian Douglas: • Drone Control and the Complementary Filter Matlab: • Understanding Sensor Fusion and Tracking, ... Video Chapters: 00:00 What is complementary Filter? Basic concept to complementary filter sensor fusion 01:38 How to convert accelerometer data to angle? Accelerometer in complementary filter 02:38 How to evaluate angle from gyroscope? Gyroscope in complementary filter 04:08 What is Dead Reckoning with examples 04:45 Sensor Fusion – Complementary Filter Algorithm 06:12 Complementary Filter Algorithm 06:38 Complementary Filter in Arduino / Source code of complementary filter 09:28 Complementary Filter on roll angle derivation 11:29 Complementary Filter comparison between 50%, 75%, 95% and 98% preset factors 12:23 Complementary Filter on pitch angle derivation 14:05 Why complementary filter uses low pass filter / high pass filter 14:40 Continuous Domain implementation of low pass filter / First Order Low Pass Filter 16:21 Discrete Domain implementation of low pass filter 17:30 Discrete Low Pass Filter / LPF 17:51 Magnetometer coming next and conclusion Music source: https://mixkit.co/free-sound-effects Other video sources: https://www.pexels.com/ I am not an expert, I am learning while I am making this video. If I am making mistakes please help and please comment your opinion Thank you for watching To support me please visit: / themakingofothers
Comments