Plant Simulation 22 - poses and pick & place operations скачать в хорошем качестве
Plant Simulation 22 - poses and pick & place operations
11 месяцев назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Plant Simulation 22 - poses and pick & place operations в качестве 4k
У нас вы можете посмотреть бесплатно Plant Simulation 22 - poses and pick & place operations или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Plant Simulation 22 - poses and pick & place operations в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
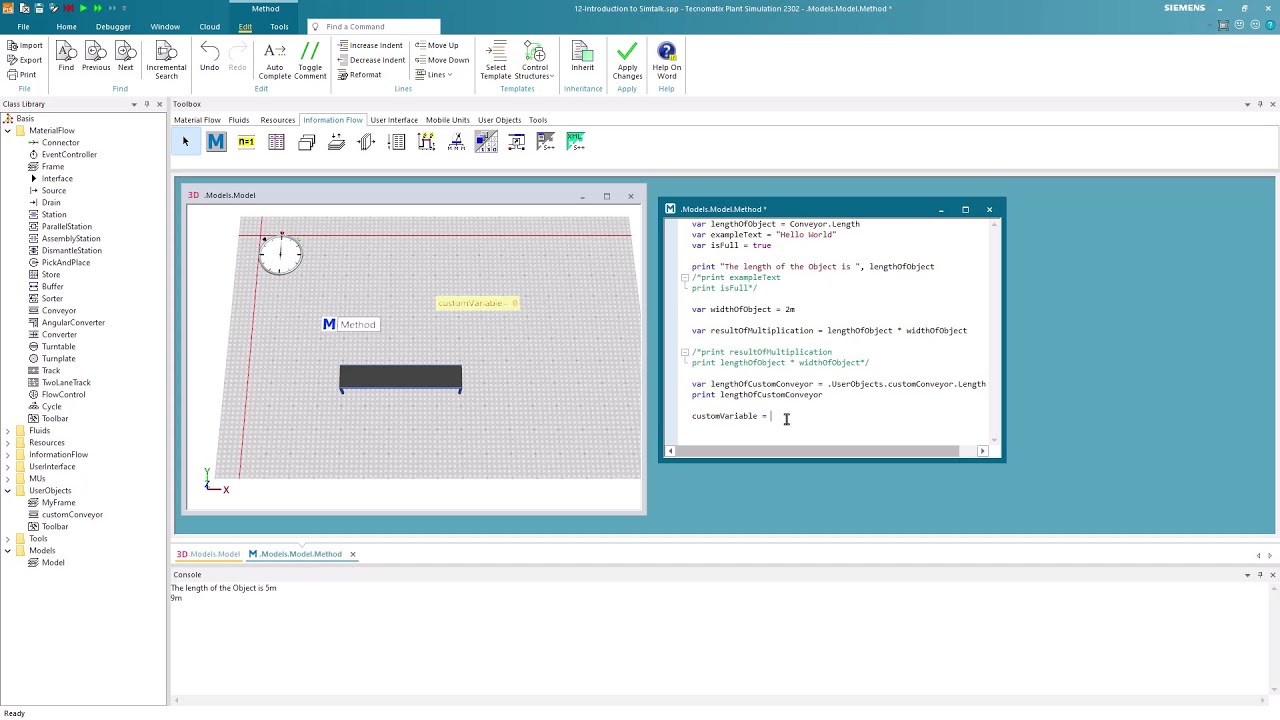
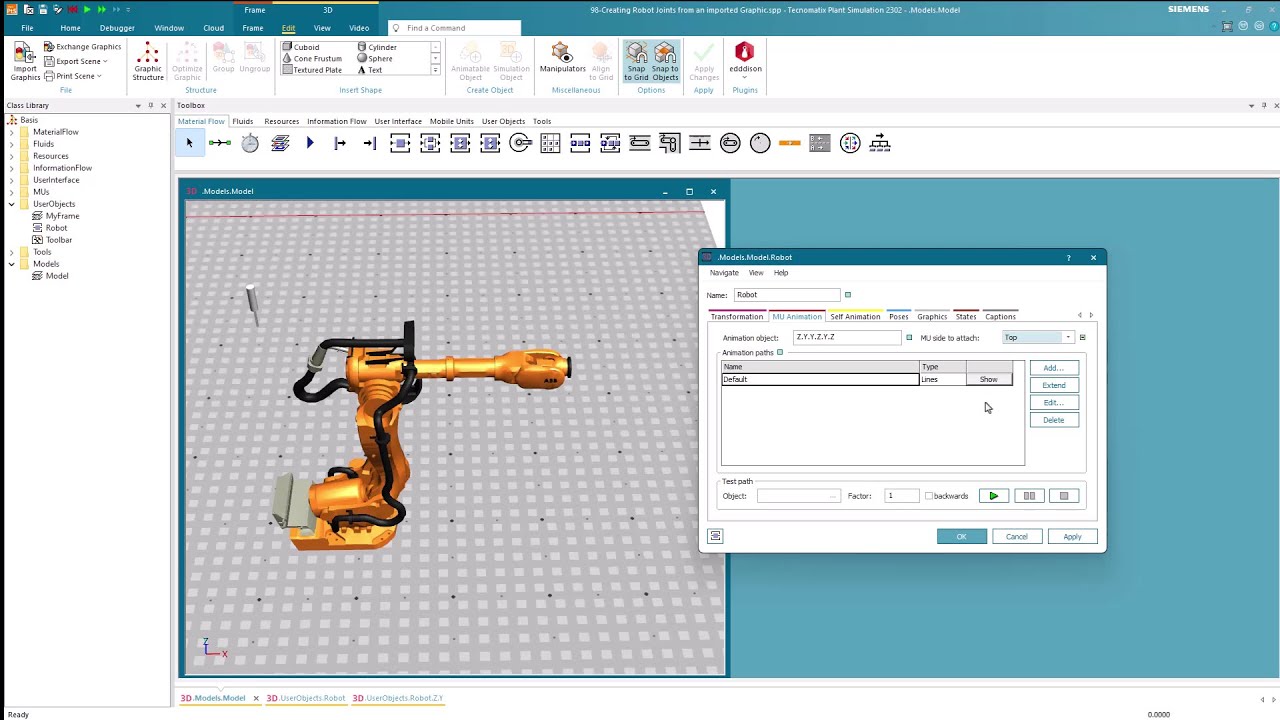
Plant Simulation 22 - poses and pick & place operations
In this comprehensive tutorial, we delve into the intricacies of utilizing Poses within your simulation environment. While our previous videos lightly touched upon this topic, here, we explore a more nuanced scenario involving the manipulation of a Comau Robot within a 3D environment. Starting with duplicating a Station and transforming it into a Robot, we progress to integrating it into a simulation framework alongside a source and conveyor. Throughout the tutorial, we demonstrate the creation and manipulation of poses to facilitate intricate pick and place operations. From interactively defining poses to employing SimTalk code for enhanced control, we navigate the complexities of coordinating robotic movements with precision. Additionally, we discuss strategies to future-proof your code and generalize poses for broader applicability. Along the way, we encounter challenges, iterate through variable gymnastics, and emphasize the importance of leveraging online resources for coding success. Whether you're a novice or an experienced programmer, join us on this journey to master the art of poses and pick and place operations. With a blend of technical insights and practical tips, this tutorial equips you with the skills needed to orchestrate seamless robotic workflows in your simulations. So, buckle up, and let's embark on this enlightening exploration of poses and pick and place operations. We welcome your comments and feedback, so let us know if you have any questions or suggestions for future videos. If you have any questions about the video's content, we encourage you to post them in the Plant Simulation User Forum (Tecnomatix Plant Simulation). Not only can others benefit from the answers, but you may also find that your question has already been addressed there: https://sie.ag/4ty8jo 0:00 - Intro 0:22 - Setting up the Model 1:07 - Starting the Simulation 1:40 - Creating Poses 4:29 - Creating Controls to move the robot to the Poses 7:48 - Using SimTalk Code to move the Robot 7:59 - Using the moveToCoordinate Method 9:25 - Making the Code more Robust 11:20 - Using the getPositionOfObject Method 13:02 - Using the getRotationOfObject Method 15:02 - Using the getMUAnimationPosition Method 22:35 - Outro
Comments













![Почему работает теория шести рукопожатий? [Veritasium]](https://imager.clipsaver.ru/ggI1xKzoANs/max.jpg)
