The IDSC Tailsitter скачать в хорошем качестве
The IDSC Tailsitter
9 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: The IDSC Tailsitter в качестве 4k
У нас вы можете посмотреть бесплатно The IDSC Tailsitter или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон The IDSC Tailsitter в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
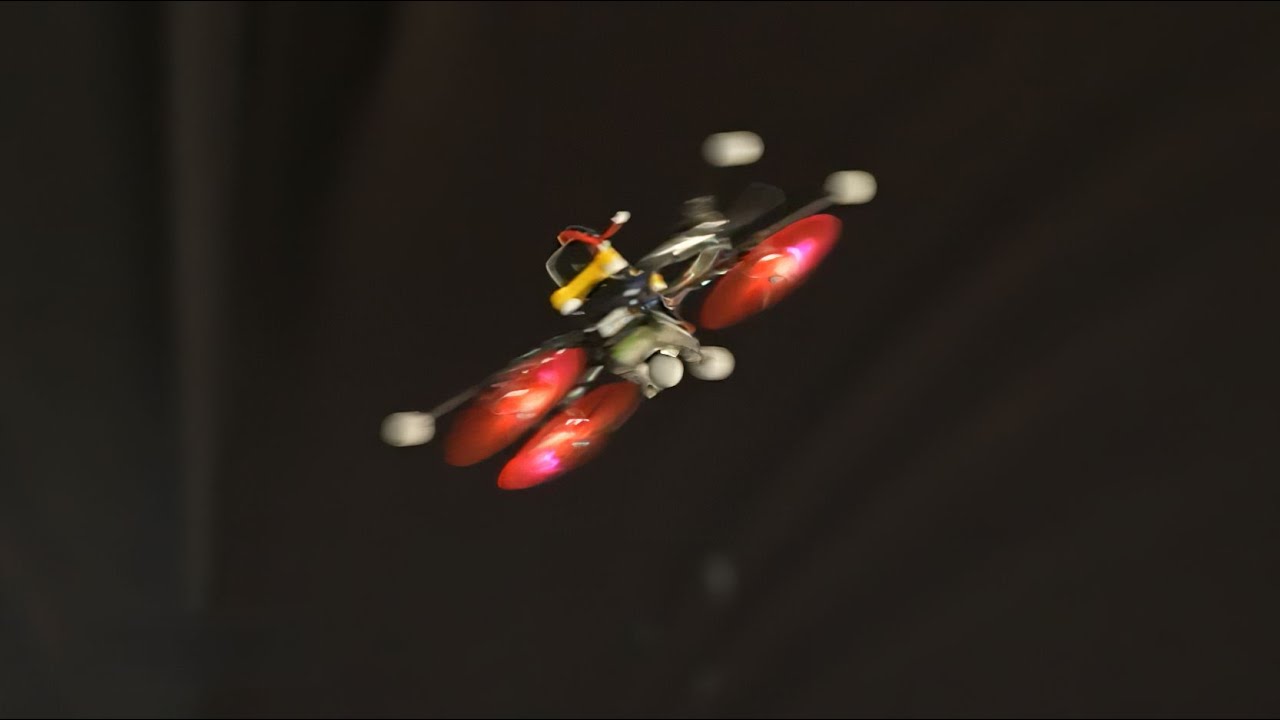
The IDSC Tailsitter
The IDSC Tailsitter: an agile and robust flying vehicle combining hover capabilities with efficient forward flight This video introduces the IDSC Tailsitter which has been designed at the Institute for Dynamic Systems and Control, ETH Zurich. The airframe is based on a Clark Y profile and designed such that for regular flight the pitching moment vanishes for zero flap angle, and such that the aerodynamic neutral point coincides with the vehicle's center of gravity. The objective of this design is to allow agile maneuvers for all flight regimes and to avoid flap angle saturation problems caused by large trim angles. The vehicle is controlled by a global controller enabling recovery to hover from any initial condition. A cascaded control architecture is used: Based on position and velocity errors an outer control loop computes a desired attitude keeping the vehicle in coordinated flight, while an inner control loop tracks the desired attitude using a lookup table with precomputed optimal attitude trajectories. The control algorithms are presented in the research papers "A Global Strategy for Tailsitter Hover Control", International Symposium on Robotics Research (ISRR), 2015, https://doi.org/10.1007/978-3-319-515..., and "A global controller for flying wing tailsitter vehicles", IEEE International Conference on Robotics and Automation (ICRA), 2017, https://doi.org/10.1109/ICRA.2017.798.... The on-board state estimation algorithms and technology are provided by the ETH spin-off company Verity Studios (http://www.veritystudios.com). With friendly permission from TED. Raffaello D'Andrea's full TED talk is available at https://www.ted.com/talks/raffaello_d.... Researchers Robin Ritz and Raffaello D'Andrea Institute for Dynamic Systems and Control (IDSC), ETH Zurich, Switzerland - http://www.idsc.ethz.ch Location ETH Zurich, Flying Machine Arena - http://www.flyingmachinearena.org Technical details Airframe: Custom design based on a Clark Y profile Electronics: Custom design using a Cortex M4F microprocessor Battery: Thunder Power RC G8 Pro Lite 25C LiPo 480mAh 2S Motors: Hacker A05-13S Motor controllers: Dys SN20A Mini ESCs with SimonK firmware Propellers: 5x3 GWS EP-5030 Flap servos: MKS DS65K Infrastructure: Flying Machine Arena Acknowledgments This work is supported by and builds upon prior contributions by numerous collaborators in the Flying Machine Arena project. See http://www.flyingmachinearena.org/people. This research was supported by the Hans-Eggenberger Stiftung and the SNSF (Swiss National Science Foundation).
Comments