Последние добавленные видео:
inverse-kinematics
-
 2 года назад
32781 2 года назад 2:54
2 года назад
32781 2 года назад 2:54Обратная или прямая кинематика. Объяснение за 3 минуты.
-
 3 года назад
152204 3 года назад 9:41
3 года назад
152204 3 года назад 9:41Inverse Kinematics of Robots | Robotics 101
-
 5 лет назад
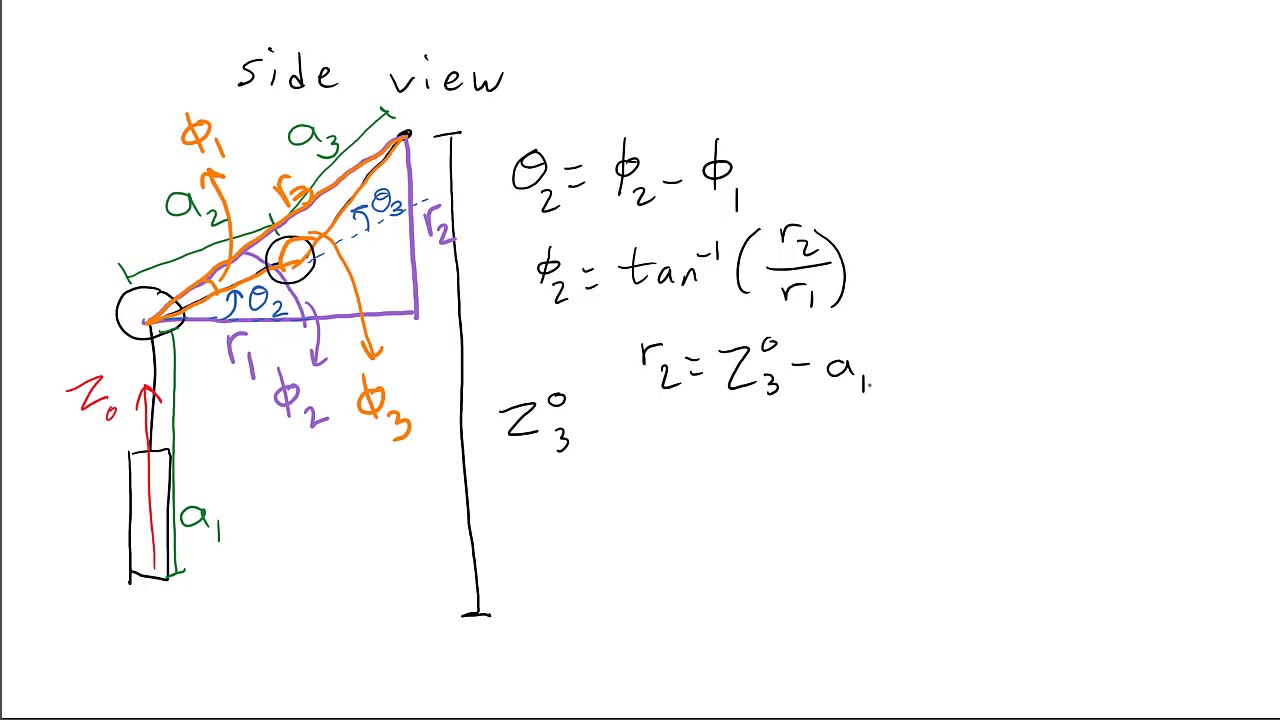
51483 5 лет назад 5:51
5 лет назад
51483 5 лет назад 5:51Inverse kinematics. Explaining every step
-
 7 месяцев назад
164141 7 месяцев назад 14:31
7 месяцев назад
164141 7 месяцев назад 14:31Освойте инверсную кинематику для роботов Arduino — простая математика, полный код, реальные резул...
-
 1 месяц назад
30427 1 месяц назад 13:21
1 месяц назад
30427 1 месяц назад 13:21Обратная кинематика — Учебное пособие по Godot 4.6
-
 7 лет назад
880457 7 лет назад 2:30
7 лет назад
880457 7 лет назад 2:30Blender 2.8 Инверсная кинематика за 2 минуты!
-
 9 месяцев назад
26142 9 месяцев назад 6:40
9 месяцев назад
26142 9 месяцев назад 6:40Build Robot using Simple High School Math
-
 3 года назад
40274 3 года назад 51:59
3 года назад
40274 3 года назад 51:59SYSC 4206 Lecture 7: Inverse kinematics 2, 6DOF robot arm with spherical wrist
-
 8 лет назад
26696 8 лет назад 4:03
8 лет назад
26696 8 лет назад 4:03Modern Robotics, Chapter 6: Inverse Kinematics of Open Chains
-
 4 года назад
142813 4 года назад 5:49
4 года назад
142813 4 года назад 5:49Простая обратная кинематика для рук робота
-
 3 года назад
48196 3 года назад 12:35
3 года назад
48196 3 года назад 12:35Inverse Kinematics (with solved example) | Planar RRP robot | Robotics 101
-
 8 месяцев назад
107837 8 месяцев назад 1:35
8 месяцев назад
107837 8 месяцев назад 1:35Blender: FEET Inverse Kinematics (FAST)
-
 10 месяцев назад
314336 10 месяцев назад 16:53
10 месяцев назад
314336 10 месяцев назад 16:53It is Easier Than Solving Quadratic Equation
-
 8 лет назад
130488 8 лет назад 14:23
8 лет назад
130488 8 лет назад 14:23Робототехника - Обратная кинематика - Пример
-
 3 года назад
67288 3 года назад 7:19
3 года назад
67288 3 года назад 7:19Как жульничать в инверсной кинематике
-
 1 год назад
18822 1 год назад 6:55
1 год назад
18822 1 год назад 6:55FABRIK - A simple algorithm for Inverse Kinematics
-
 8 лет назад
90310 8 лет назад 13:29
8 лет назад
90310 8 лет назад 13:29Inverse Kinematics of Articulated Manipulator
-
 2 года назад
115716 2 года назад 14:24
2 года назад
115716 2 года назад 14:24Robot Inverse Kinematics With A Hexapod Leg
-
 2 года назад
64201 2 года назад 1:41:55
2 года назад
64201 2 года назад 1:41:556 Axis Robot Forward & Inverse Kinematics Tutorial - Denavit Hartenberg Parameters With the AR4-MK2