Ep#39: MolmoAct: An Action Reasoning Model that reasons in 3D space скачать в хорошем качестве
Ep#39: MolmoAct: An Action Reasoning Model that reasons in 3D space
3 месяца назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Ep#39: MolmoAct: An Action Reasoning Model that reasons in 3D space в качестве 4k
У нас вы можете посмотреть бесплатно Ep#39: MolmoAct: An Action Reasoning Model that reasons in 3D space или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Ep#39: MolmoAct: An Action Reasoning Model that reasons in 3D space в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Ep#39: MolmoAct: An Action Reasoning Model that reasons in 3D space
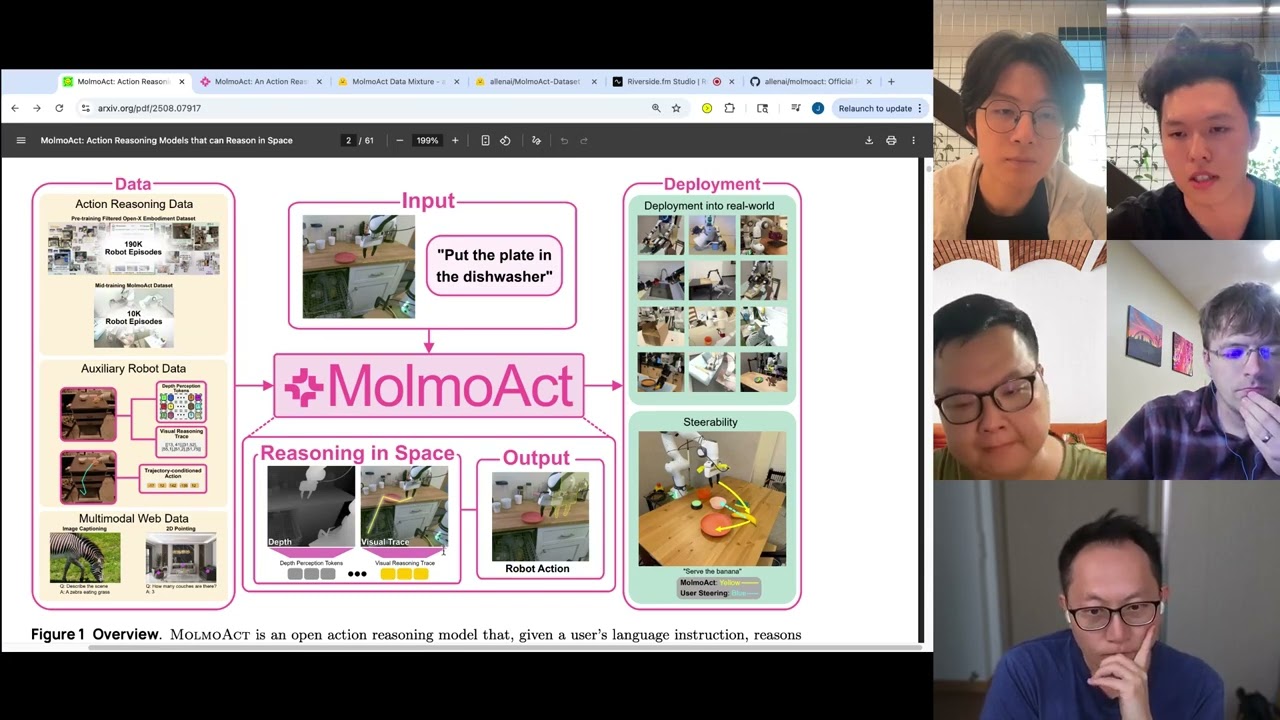
Reasoning models have massively expanded what LLMs are capable of, but this hasn’t necessarily applied to robotics. Perhaps this is in part because robots need to reason over space, not just words and symbols; so the robotics version of a reasoning model would need to think in 3D. That’s the idea behind MolmoAct, an “Action Reasoning Model” which generates spatial plans in order to predict precise low-level robot actions. Jason Lee, Haoquan Fang, and Jiafei Duan told us more about their work. Watch Episode #39 of RoboPapers, with Michael Cho and Chris Paxton, now! Abstract: Reasoning is central to purposeful action, yet most robotic foundation models map perception and instructions directly to control, which limits adaptability, generalization, and semantic grounding. We introduce Action Reasoning Models (ARMs), a class of robotic foundation models that integrate perception, planning, and control through a structured three-stage pipeline. Our model, MolmoAct, encodes observations and instructions into depth-aware perception tokens, generates mid-level spatial plans as editable trajectory traces, and predicts precise low-level actions, enabling explainable and steerable behavior. MolmoAct-7B-D achieves strong performance across simulation and real-world settings: 70.5% zero-shot accuracy on SimplerEnv Visual Matching tasks, surpassing closed-source Pi-0 and GR00T N1.5; 86.6% average success on LIBERO, including an additional 6.3% gain over ThinkAct on long-horizon tasks; and in real-world fine-tuning, an additional 10% (single-arm) and an additional 22.7% (bimanual) task progression over Pi-0-FAST. It also outperforms baselines by an additional 23.3% on out-of-distribution generalization and achieves top human-preference scores for open-ended instruction following and trajectory steering. Furthermore, we release, for the first time, the MolmoAct Dataset -- a mid-training robot dataset comprising over 10,000 high quality robot trajectories across diverse scenarios and tasks. Training with this dataset yields an average 5.5% improvement in general performance over the base model. We release all model weights, training code, our collected dataset, and our action reasoning dataset, establishing MolmoAct as both a state-of-the-art robotics foundation model and an open blueprint for building ARMs that transform perception into purposeful action through structured reasoning. Blogpost: this https UR.
Comments
-
 6 месяцев назад
6 месяцев назад
-
 6 месяцев назад
6 месяцев назад
-
 8 дней назад
8 дней назад
-
 2 недели назад
2 недели назад
-
 12 дней назад
12 дней назад
-
 11 месяцев назад
11 месяцев назад
-
 Трансляция закончилась 3 дня назад
Трансляция закончилась 3 дня назад
-
 5 месяцев назад
5 месяцев назад
-
 1 день назад
1 день назад
-
 2 года назад
2 года назад
-
 2 дня назад
2 дня назад
-
 4 месяца назад
4 месяца назад
-
 2 года назад
2 года назад
-
 22 часа назад
22 часа назад
-
 1 год назад
1 год назад
-
 4 недели назад
4 недели назад
-
 3 месяца назад
3 месяца назад
-
 1 день назад
1 день назад
-
 5 дней назад
5 дней назад
-
 3 дня назад
3 дня назад