Linear RGB-D SLAM for Planar Environments (ECCV 2018) скачать в хорошем качестве
Linear RGB-D SLAM for Planar Environments (ECCV 2018)
7 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Linear RGB-D SLAM for Planar Environments (ECCV 2018) в качестве 4k
У нас вы можете посмотреть бесплатно Linear RGB-D SLAM for Planar Environments (ECCV 2018) или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Linear RGB-D SLAM for Planar Environments (ECCV 2018) в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
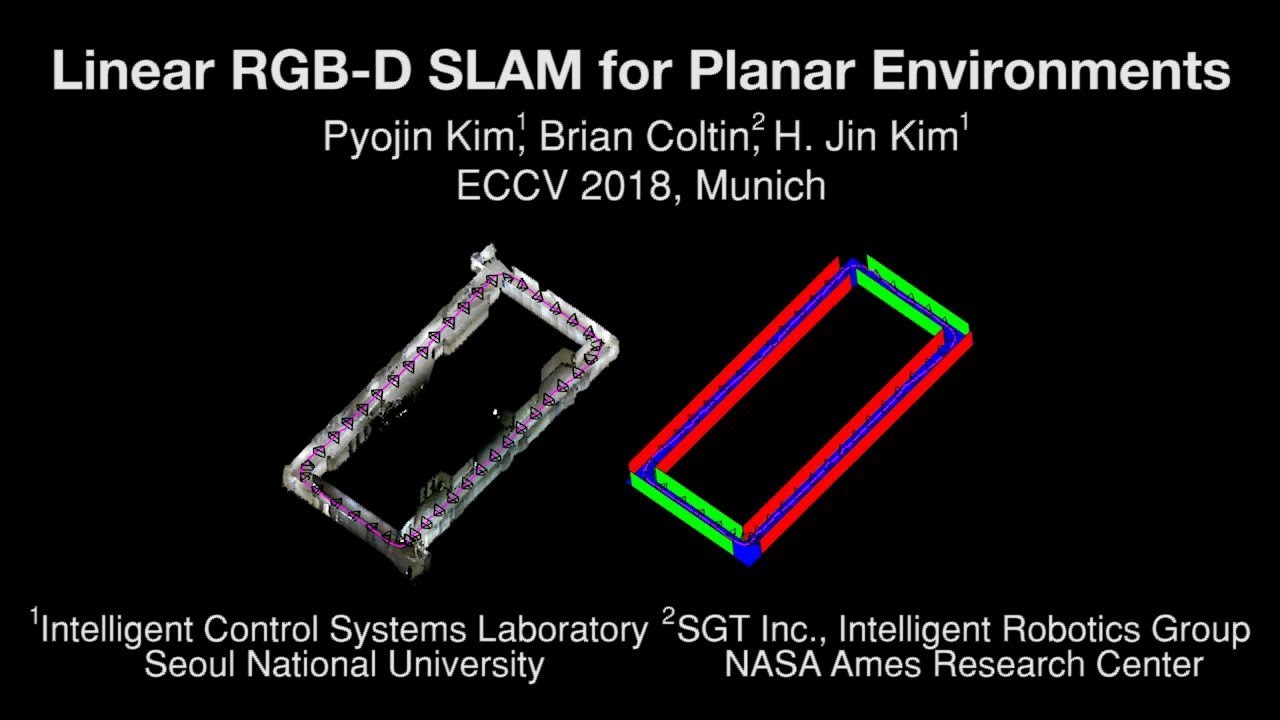
Linear RGB-D SLAM for Planar Environments (ECCV 2018)
We propose a new formulation for including orthogonal planar features as a global model into a linear SLAM approach based on sequential Bayesian filtering. Previous planar SLAM algorithms estimate the camera poses and multiple landmark planes in a pose graph optimization. However, since it is formulated as a high dimensional nonlinear optimization problem, there is no guarantee the algorithm will converge to the global optimum. To overcome these limitations, we present a new SLAM method that jointly estimates camera position and planar landmarks in the map within a linear Kalman filter framework. It is rotations that make the SLAM problem highly nonlinear. Therefore, we solve for the rotational motion of the camera using structural regularities in the Manhattan world (MW), resulting in a linear SLAM formulation. We test our algorithm on standard RGB-D benchmarks as well as additional large indoor environments, demonstrating comparable performance to other state-of-the-art SLAM methods without the use of expensive nonlinear optimization. Paper: http://pyojinkim.com/download/papers/... Kim, Pyojin, Brian Coltin, and H. Jin Kim. "Linear RGB-D SLAM for Planar Environments.", European Conference on Computer Vision (ECCV), Munich, 2018.
Comments















![Почему работает теория шести рукопожатий? [Veritasium]](https://imager.clipsaver.ru/ggI1xKzoANs/max.jpg)


