π*0.6 논문 리뷰: VLA 모델에 강화학습(RL)을 결합하면 무엇이 달라질까? | 최신 Physical AI 논문 완벽 정리 скачать в хорошем качестве
π*0.6 논문 리뷰: VLA 모델에 강화학습(RL)을 결합하면 무엇이 달라질까? | 최신 Physical AI 논문 완벽 정리
1 месяц назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: π*0.6 논문 리뷰: VLA 모델에 강화학습(RL)을 결합하면 무엇이 달라질까? | 최신 Physical AI 논문 완벽 정리 в качестве 4k
У нас вы можете посмотреть бесплатно π*0.6 논문 리뷰: VLA 모델에 강화학습(RL)을 결합하면 무엇이 달라질까? | 최신 Physical AI 논문 완벽 정리 или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон π*0.6 논문 리뷰: VLA 모델에 강화학습(RL)을 결합하면 무엇이 달라질까? | 최신 Physical AI 논문 완벽 정리 в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
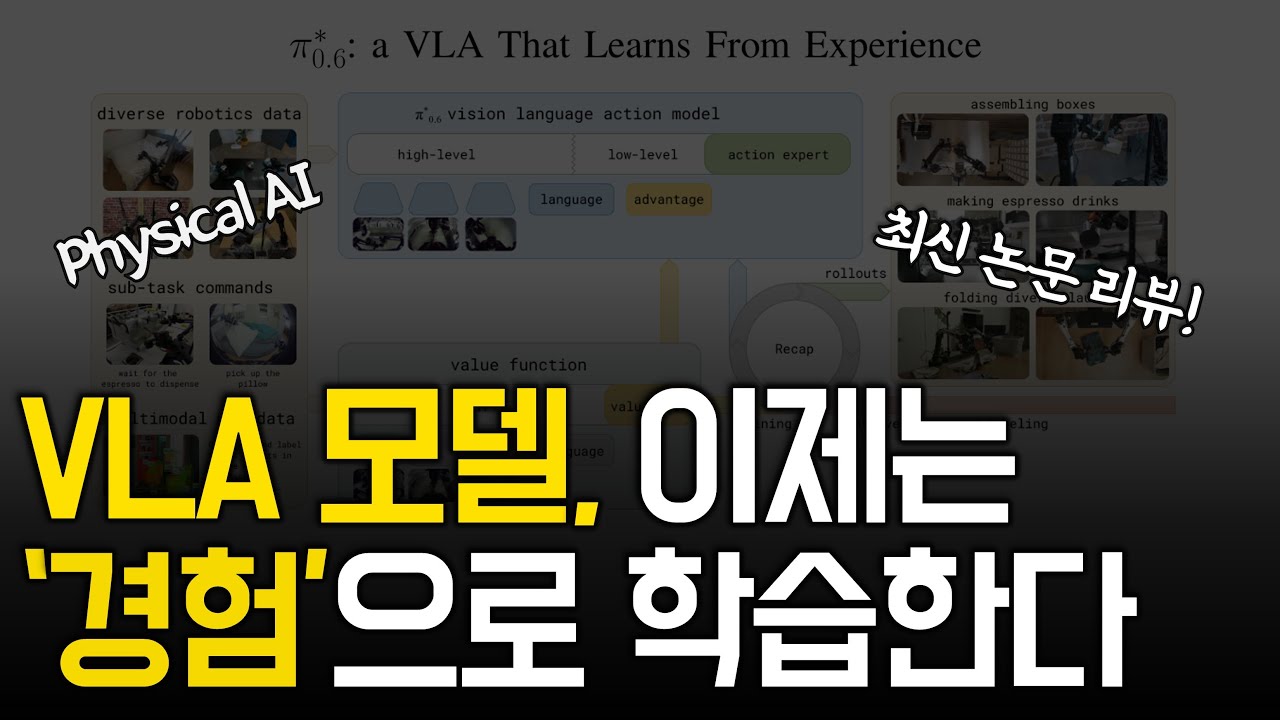
π*0.6 논문 리뷰: VLA 모델에 강화학습(RL)을 결합하면 무엇이 달라질까? | 최신 Physical AI 논문 완벽 정리
Physical AI를 개념적으로 설명하는 강의가 아니라, Isaac Sim을 활용한 실제로 하나의 로봇 시스템을 끝까지 구현하는 '실전 프로젝트' 강의가 궁금하다면? 🤖 • Physical AI 실전 프로젝트 | Isaac Sim으로 Spot+ATS... VLA(Vision-Language-Action) 모델은 왜 실제 로봇 환경에서 쉽게 무너질까? π*0.6 논문을 통해, 강화학습(RL)을 결합한 Experience-aware VLA 아키텍처의 핵심을 정리합니다. 00:00 인트로 – 왜 기존 VLA는 부족했을까? 01:34 π*0.6: A VLA That Learns From Experience 03:41 π*0.6의 핵심 아이디어 11:16 학습 구조 상세 16:40 정책 아키텍처와 액션 표현 방식의 설계 24:47 실험 구성과 평가 방법, 실험 결과 요약 26:11 마무리 – 실전 로봇 학습에 주는 시사점 #physicalai #vla #강화학습 #reinforcementlearning #AI논문리뷰 #robotics #robotlearning
Comments
-
 1 месяц назад
1 месяц назад
-
![Цепи Маркова — математика предсказаний [Veritasium]](https://imager.clipsaver.ru/QI7oUwNrQ34/max.jpg) 4 месяца назад
4 месяца назад
-
 19 часов назад
19 часов назад
-
 1 год назад
1 год назад
-
 4 дня назад
4 дня назад
-
 2 месяца назад
2 месяца назад
-
 8 месяцев назад
8 месяцев назад
-
![[🔴02/27 #당잠사] 엔비디아, 호실적 불구 하락…”AI 기대 선반영 부담” | 반도체주 동반 약세 | 미-이란, 3차 핵협상 종료 | #엔비디아 #브로드컴 #마이크론](https://imager.clipsaver.ru/2QjcDQMv_D8/max.jpg) Трансляция закончилась 5 часов назад
Трансляция закончилась 5 часов назад
-
 10 месяцев назад
10 месяцев назад
-
 3 месяца назад
3 месяца назад
-
 1 месяц назад
1 месяц назад
-
 2 месяца назад
2 месяца назад
-
 9 месяцев назад
9 месяцев назад
-
 Трансляция закончилась 4 недели назад
Трансляция закончилась 4 недели назад
-
![[모두팝×LAB] VLA(Vision-Language-Action) 모델의 진화와 로봇 지능의 미래](https://imager.clipsaver.ru/YNI6c76Xu9I/max.jpg) 4 месяца назад
4 месяца назад
-
![[2026 다보스] 시타델 켄 그리핀 CEO 대담: 트럼프 2기 경제 정책과 AI의 미래 [풀영상]](https://imager.clipsaver.ru/h1CPpgCHdTo/max.jpg) 3 недели назад
3 недели назад
-
 2 недели назад
2 недели назад
-
 1 год назад
1 год назад
-
 7 месяцев назад
7 месяцев назад
-
![AI 특이점, 5년 안에 온다고? 프콘도 깜짝 놀란 과학자들의 진짜 AI 썰 (feat. 박태웅 의장) [취미는 과학/ 24화 확장판]](https://imager.clipsaver.ru/0KDosjF0iYM/max.jpg) 11 месяцев назад
11 месяцев назад