Verifying "Known Scenarios": A Key to SOTIF Risk Assessment скачать в хорошем качестве
Verifying "Known Scenarios": A Key to SOTIF Risk Assessment
2 недели назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Verifying "Known Scenarios": A Key to SOTIF Risk Assessment в качестве 4k
У нас вы можете посмотреть бесплатно Verifying "Known Scenarios": A Key to SOTIF Risk Assessment или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Verifying "Known Scenarios": A Key to SOTIF Risk Assessment в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Verifying "Known Scenarios": A Key to SOTIF Risk Assessment
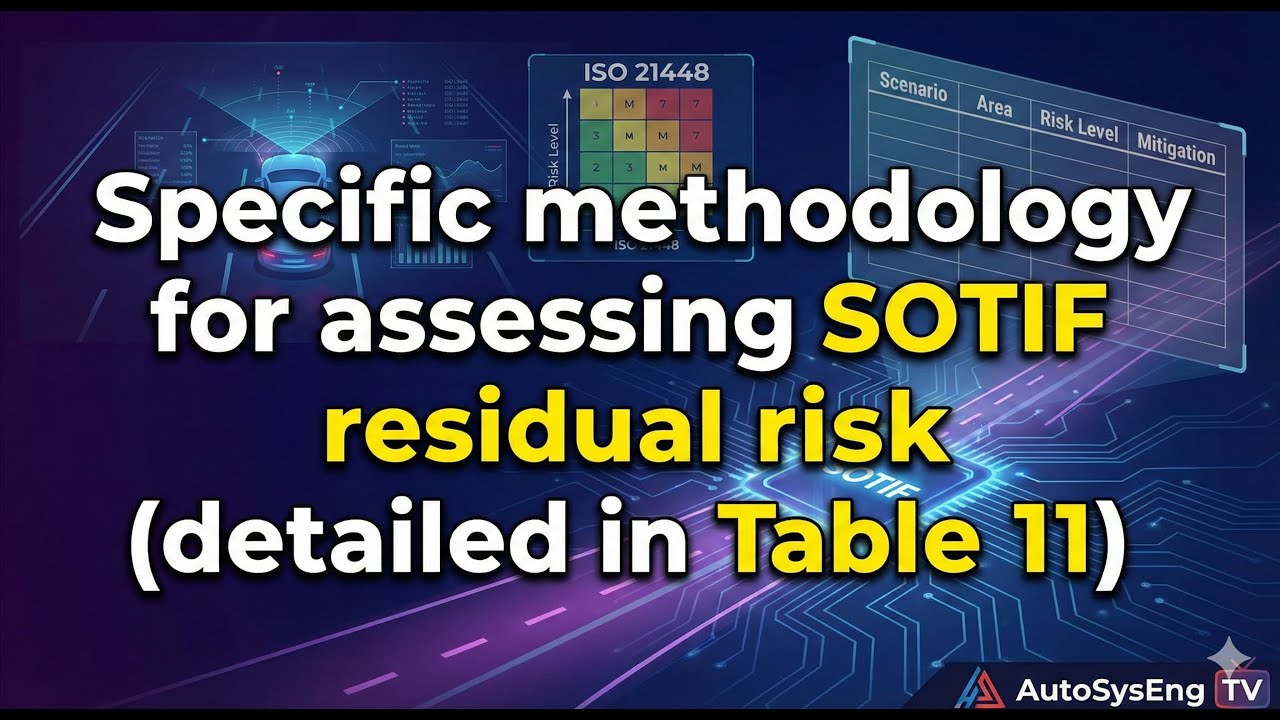
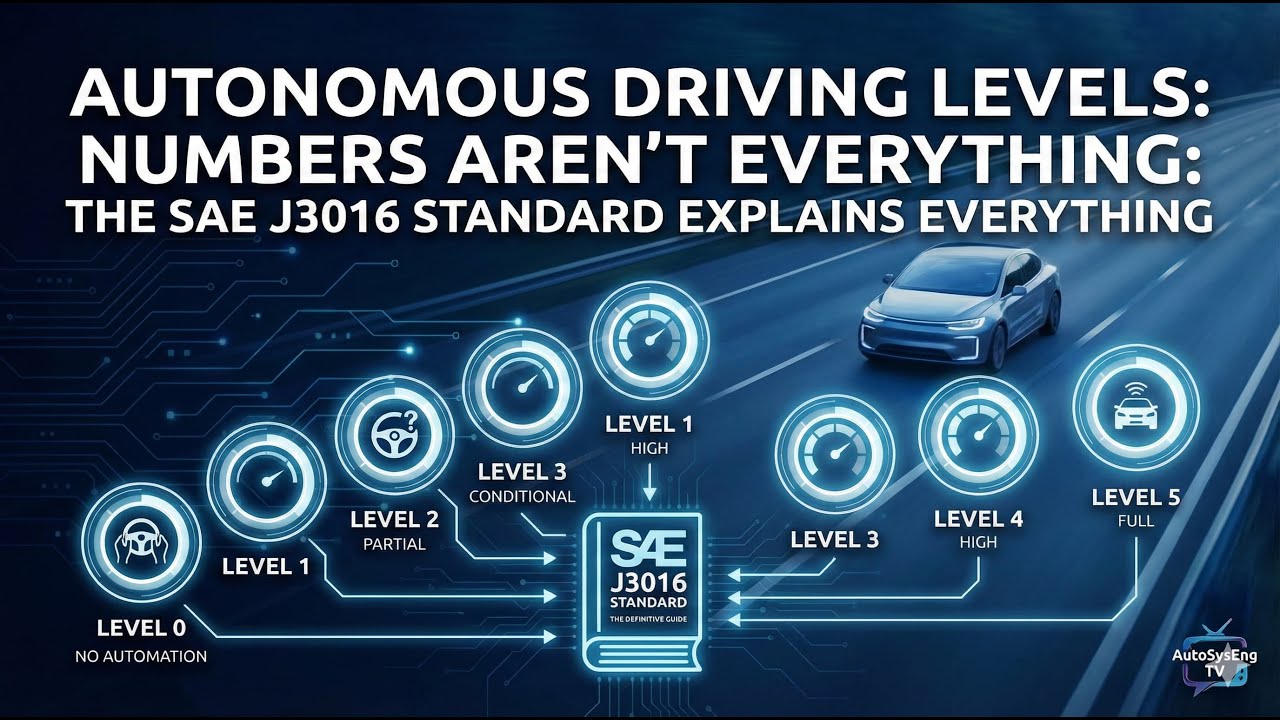
How can a perfectly functioning car still be unsafe? In this video, we dive deep into SOTIF (ISO 21448) Clause 10, focusing on the critical process of verifying "Known Unsafe Scenarios." While traditional functional safety (ISO 26262) focuses on preventing hardware and software failures, SOTIF addresses the risks arising from functional limitations and environmental conditions—like sun glare blinding a camera or radar confusion under a bridge. We explore: The fundamental difference between ISO 26262 and SOTIF. The 4 Zones of Scenarios and why Zone 2 (Known Unsafe) is the starting point for safety. The rigorous 5-step testing framework for AI. The "Sense-Plan-Act" verification chain. Key safety acceptance principles: GAMAP and ALARP. Timestamps: 00:00 Introduction: The Paradox of a Perfectly Working Car 01:16 SOTIF vs. ISO 26262: Understanding Functional Limits 01:53 The 4 Zones of Scenarios: Mapping the Known and Unknown 02:19 Deep Dive: SOTIF Clause 10 & Known Unsafe Scenarios 02:50 The 5-Step Ultimate Driving Test for AI 03:28 Sense, Plan, Act: Breaking Down the Verification Chain 04:59 When is a Car "Safe Enough"? Defining Unreasonable Risk 06:55 Decision Principles: GAMAP and ALARP Explained 07:42 Conclusion: Building a Solid Foundation for Autonomy #SOTIF #ISO21448 #AutonomousDriving
Comments