Учебник Webots 4: использование энкодеров для вычисления положения робота (одометрия) // Датчик п... скачать в хорошем качестве
Учебник Webots 4: использование энкодеров для вычисления положения робота (одометрия) // Датчик п...
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Учебник Webots 4: использование энкодеров для вычисления положения робота (одометрия) // Датчик п... в качестве 4k
У нас вы можете посмотреть бесплатно Учебник Webots 4: использование энкодеров для вычисления положения робота (одометрия) // Датчик п... или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Учебник Webots 4: использование энкодеров для вычисления положения робота (одометрия) // Датчик п... в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Учебник Webots 4: использование энкодеров для вычисления положения робота (одометрия) // Датчик п...
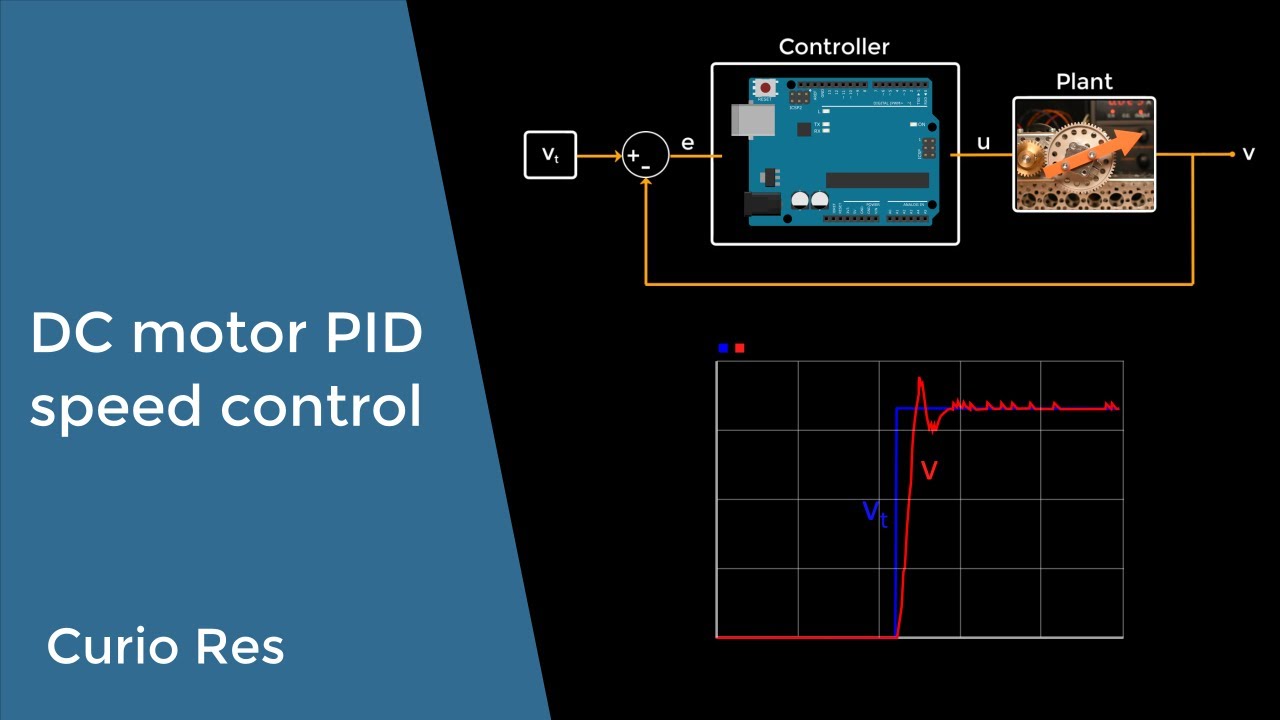
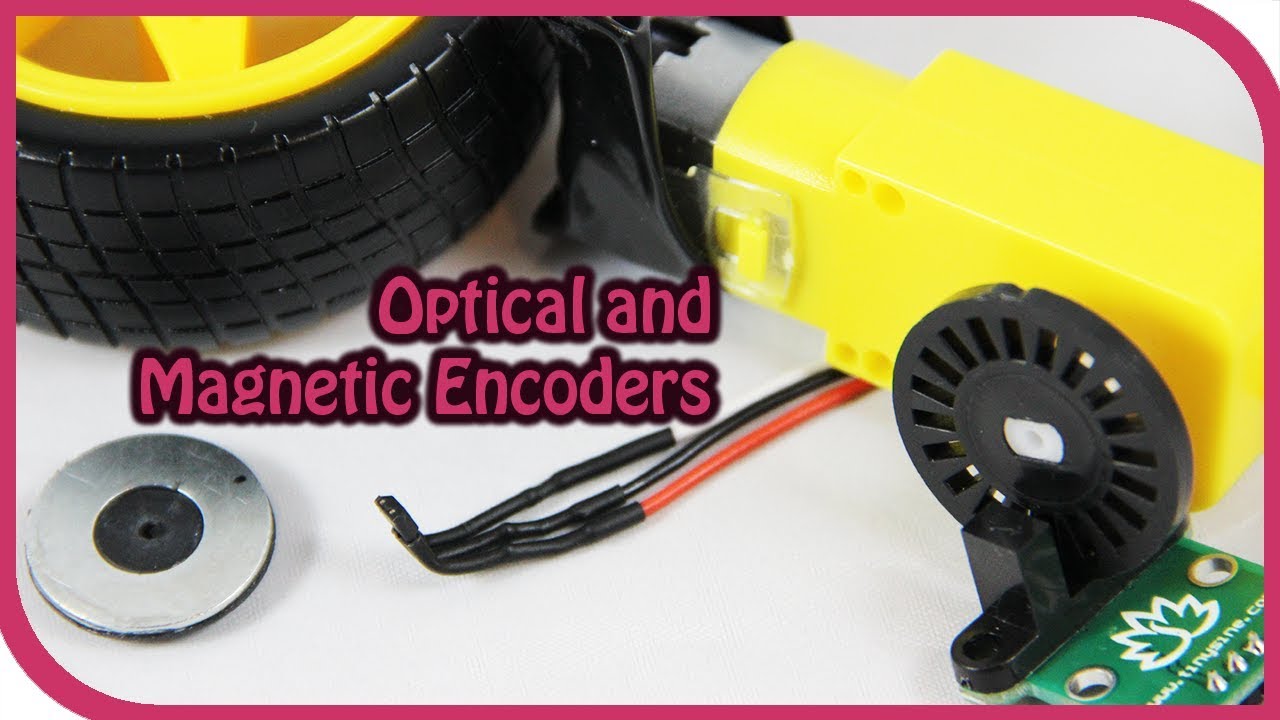
Всем привет! Меня зовут Каджал, и я снова рада приветствовать вас в очередном обучающем видео по Webots. В сегодняшнем обучающем видео мы поговорим о том, как вычислять положение робота с помощью энкодера. В Webots в качестве энкодера мы будем использовать датчик положения. На прошлой неделе я рассказывал о системах с открытым и закрытым контуром управления. Чтобы система работала в замкнутом контуре, вашему роботу нужна обратная связь. Мы добавляем эту обратную связь в виде положения робота. Это также называется одометрией, которая использует данные датчиков для оценки положения робота. Вычисление положения робота (одометрия) — важная часть робототехники. С её помощью вы сможете продвинуться в построении карт, прокладке маршрутов и управлении роботами по этим маршрутам. Изучение робототехники в целом может показаться сложным. Поэтому давайте разберёмся с этим руководством для начинающих. ========== ЧТО ТАКОЕ WEBOTS? ========== Webots — это бесплатное программное обеспечение с открытым исходным кодом для моделирования в робототехнике. Это отличный способ изучить робототехнику и начать работать с ней, не вкладываясь в дорогостоящее оборудование. С помощью Webots вы изучите как аппаратное обеспечение (моделирование робота), так и программное обеспечение (написание кода для управления роботом). Сайт Webots: https://www.cyberbotics.com/ 🕑 ХРОНОЛОГИИ 0:00 Введение 0:36 Как добавить датчик положения (энкодер) в Webots? 1:50 Написание кода для датчика положения (энкодера) в Webots 3:16 Создание экземпляра датчика положения в Webots 4:28 Работа энкодеров и датчиков положения в Webots 5:47 Вычисление блока энкодера в Webots 6:40 Вычисление положения робота (одометрия) в Webots 9:30 Ошибки в энкодере 10:12 Заключение к обучающему видео по Webots 📹 ВИДЕО ПО ТЕМЕ - СЕРИЯ УЧЕБНЫХ МАТЕРИАЛОВ ПО WEBOTS Посмотрите полную серию здесь: • Webots Tutorial Series in Python // Get st... (1) Урок 1 по Webots: Введение в Webots • Introduction to webots: how to install and... (2) Урок 2 по Webots: Создание собственного дифференциального привода для двух колёс Робот • How to design a 2 wheel differential drive... (3) Урок 3 по Webots: Код контроллера для управления роботом с дифференциальным приводом // Урок по Webots на Python • Webots tutorial 3: Controller code to driv... 🚀 ВИДЕОРУСИКИ (1) Зачем использовать _main_ при программировании на Python? / un. . (2) Принцип работы энкодеров: • Adventures in Science: How to Use Rotary E... (3) Функции доступа к датчикам (например, энкодеру, датчику положения, GPS и т. д.) и исполнительным механизмам (например, двигателям) в Webots: https://cyberbotics.com/doc/reference... (4) Дополнительная информация о датчике положения в Webots: https://cyberbotics.com/doc/reference... (5) Вычисление одометрии для дифференциального привода Роботы: https://hackernoon.com/feedback-odome... 🚀 БЕСПЛАТНЫЕ РЕСУРСЫ Подписка на рассылку новостей по робототехнике (списки вакансий и обновления): https://sendfox.com/kajalgada План развития робототехники / roadmap-to-robotics-part-1 Список проектов по робототехнике: https://sendfox.com/lp/1rx02z Чек-лист для домашнего задания по программированию: https://sendfox.com/lp/3o829o 🤝 СВЯЖИТЕСЬ СО МНОЙ Свяжитесь со мной: https://kgada.info/contact/ LinkedIn: / kajalgada Instagram: / kajalgada 📚 ПОМОЩЬ С УЧЕБНЫМИ ЗАДАНИЯМИ, ПРОЕКТАМИ Если вам нужна помощь с уроком или проектом на этом канале, присоединяйтесь в Slack: https://sendfox.com/lp/1k5w9d Если вам нужна помощь с уроком, заданием или собственным проектом: Сообщество Robotics в Discord: / discord Сообщество Webots в Discord: / discord Сообщество ROS в Discord: / discord 🤖 ОБО МНЕ Привет, меня зовут Каджал. Я инженер-робототехник и владелец бизнеса. Я создал это пространство, чтобы помочь студентам и молодым специалистам построить карьеру в области робототехники. ⚙️ ОБОРУДОВАНИЕ, КОТОРОЕ Я ИСПОЛЬЗУЮ Камера: YI 4K Action and Sports Camera, камера на iPhone XS или MacBook Pro Штатив: Ravelli APLT6M 72" Light Weight Aligned Tripod Освещение: комплект кольцевой подсветки Neewer Микрофон: петличный микрофон SoLID, Samson Q2U Запись: приложение Voice Memo на iPhone или Mac Программное обеспечение для монтажа: Final Cut Pro X Дизайн миниатюр: Canva 🤟 БЛАГОДАРНОСТИ Поставьте лайк и подпишитесь на короткий ролик в конце: • YouTube like subscribe bell icon buttons g... Обязательно подпишитесь на канал: https://www.youtube.com/c/KajalGada?s...
Comments
![[РЕШЕНО] Как использовать код Python 3 в Webots на Ubuntu? // Учебное пособие по Webots Python](https://imager.clipsaver.ru/GK9hYS41pgs/max.jpg)


![Интеграция датчика расстояния в робота | Моделирование Webots | [Урок 7]](https://imager.clipsaver.ru/R7npTFI24cs/max.jpg)





![Контроллер обхода препятствий для робота | Симулятор Webots | [Урок 8]](https://imager.clipsaver.ru/l0JuUM58nOs/max.jpg)