Amcl | ROS Localization | SLAM 2 | How to localize a robot in ROS | ROS Tutorial for Beginners скачать в хорошем качестве
Amcl | ROS Localization | SLAM 2 | How to localize a robot in ROS | ROS Tutorial for Beginners
5 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Amcl | ROS Localization | SLAM 2 | How to localize a robot in ROS | ROS Tutorial for Beginners в качестве 4k
У нас вы можете посмотреть бесплатно Amcl | ROS Localization | SLAM 2 | How to localize a robot in ROS | ROS Tutorial for Beginners или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Amcl | ROS Localization | SLAM 2 | How to localize a robot in ROS | ROS Tutorial for Beginners в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Amcl | ROS Localization | SLAM 2 | How to localize a robot in ROS | ROS Tutorial for Beginners
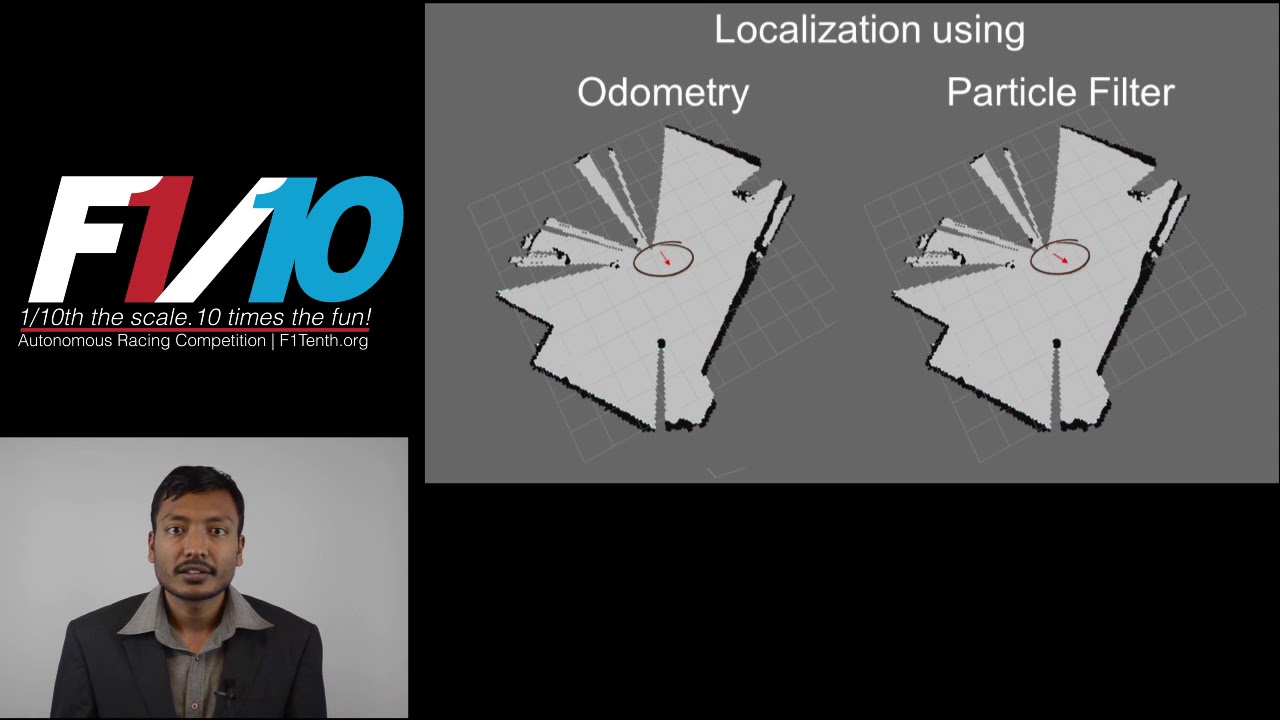
ROS Amcl In this video, we look at how to localize a robot in ros Gazebo Environment. We look at how to get the amcl launch file, understand to launch the amcl node. ROS Amcl is a probabilistic localization system for a robot moving in 2D. It implements the adaptive (or KLD-sampling) Monte Carlo localization approach (as described by Dieter Fox), which uses a particle filter to track the pose of a robot against a known map. ------------------Time Stamp -------------------- 0:00 Introduction 0:17 Topics Covered 0:50 Understanding amcl.launch 3:01 Implementation 4:55 Moving the robot and understanding Particle Filter 6:45 Loading the gmapped map. (Custom Map) 👩🏻💻 Link to the Playlist • ROS Tutorial for Beginners 👩🏻💻 Link to amcl Launch File: https://github.com/PranaliDesai/Robom... Please Like and Subscribe. Keep Watching Keep commenting Robomechtrix #amcl #localization #ros
Comments