Deadlock Analysis and Resolution for Multi-Robot Systems скачать в хорошем качестве
Deadlock Analysis and Resolution for Multi-Robot Systems
4 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Deadlock Analysis and Resolution for Multi-Robot Systems в качестве 4k
У нас вы можете посмотреть бесплатно Deadlock Analysis and Resolution for Multi-Robot Systems или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Deadlock Analysis and Resolution for Multi-Robot Systems в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Deadlock Analysis and Resolution for Multi-Robot Systems
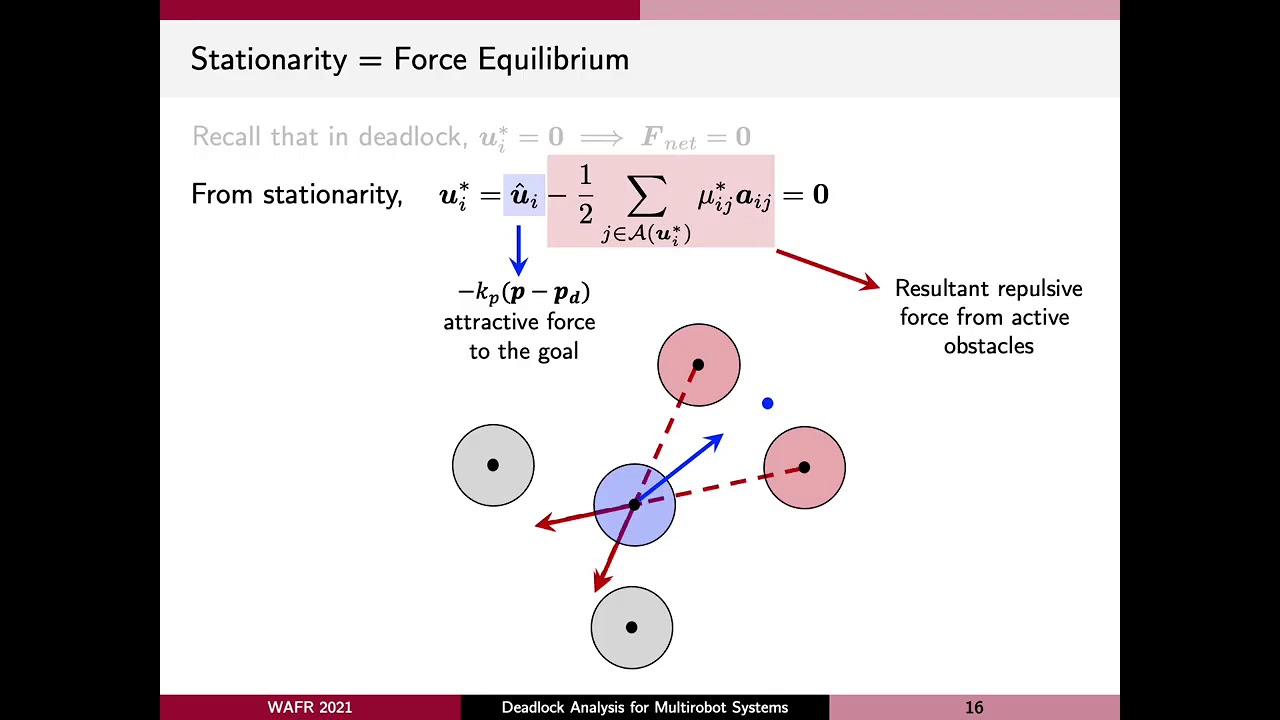
Title: Deadlock Analysis andResolution for Multi-Robot Systems Authors: Jaskaran Grover, Changliu Liu, Katia Sycara Abstract: Collision avoidance for multirobot systems is a well-studied problem. Recently, control barrier functions (CBFs) have been proposed for collision avoidance and goal stabilization. However, these methods are prone to deadlock. We formally derive characteristics of deadlock in a multirobot system that uses CBFs. We propose a novel approach to analyze deadlocks by using duality theory and graph enumeration. Our insight is that system deadlock is characterized by a force equilibrium and we show how complexity of deadlock analysis increases with the number of robots. This allows us to interpret deadlock as a subset of the state space, and we prove that this set is non-empty and located on the boundary of the safety set. Finally, we develop a provably correct algorithm for deadlock resolution. We show simulation results and validate this algorithm on Khepera robots.
Comments







![Почему реактивный двигатель не плавится? [Veritasium]](https://imager.clipsaver.ru/F6UB0V2Fct4/max.jpg)