Where Did the Dominant Pole Go? Lead-Lag Compensator Design with Root Locus скачать в хорошем качестве
Where Did the Dominant Pole Go? Lead-Lag Compensator Design with Root Locus
11 часов назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...

Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Where Did the Dominant Pole Go? Lead-Lag Compensator Design with Root Locus в качестве 4k
У нас вы можете посмотреть бесплатно Where Did the Dominant Pole Go? Lead-Lag Compensator Design with Root Locus или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Where Did the Dominant Pole Go? Lead-Lag Compensator Design with Root Locus в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Where Did the Dominant Pole Go? Lead-Lag Compensator Design with Root Locus
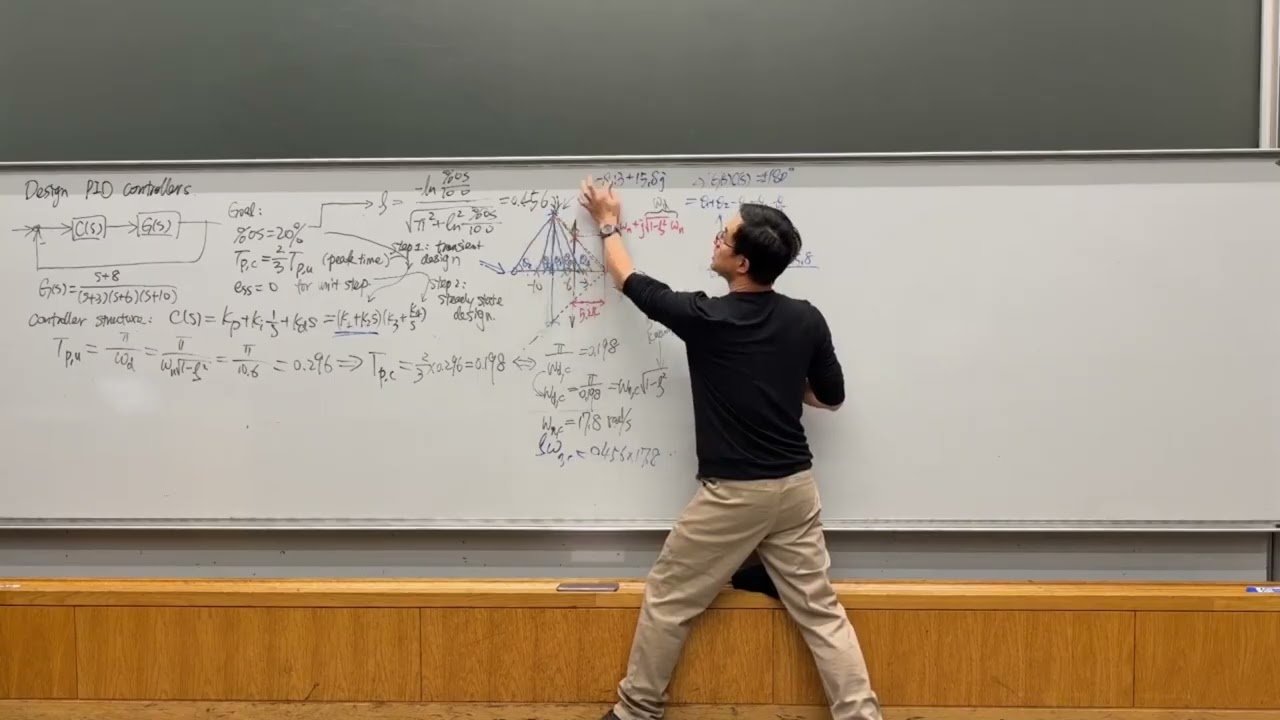
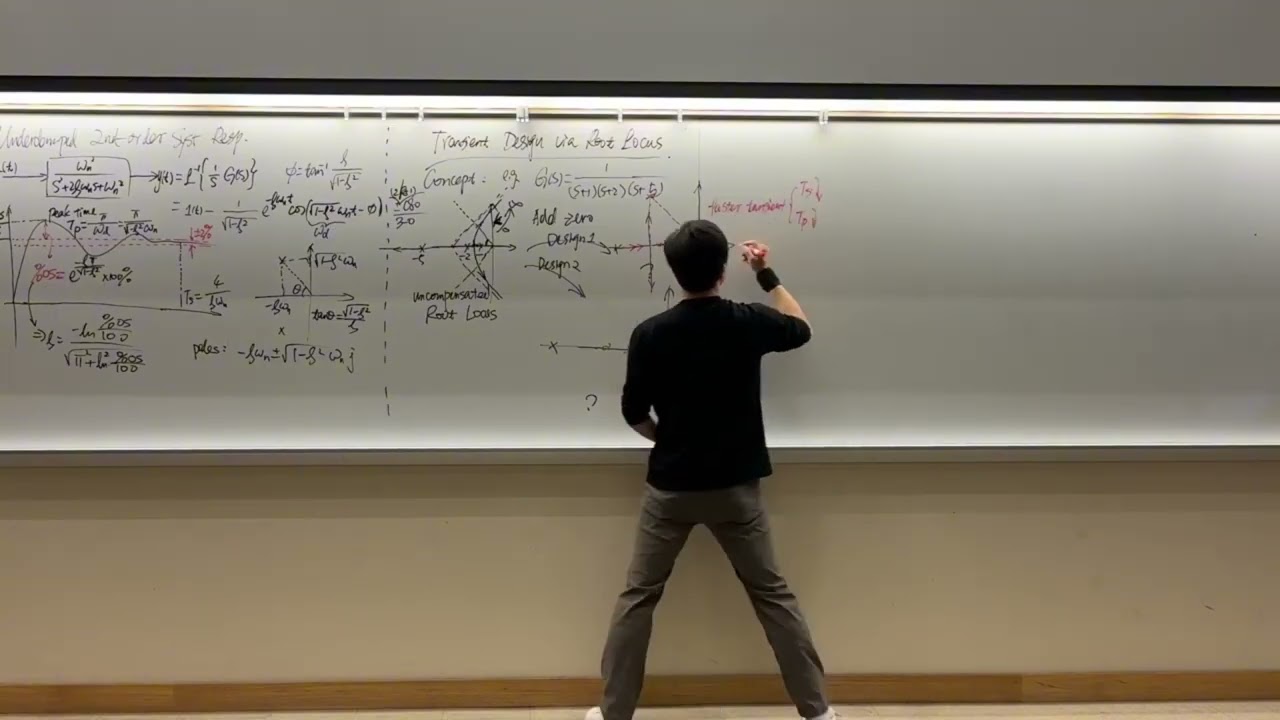
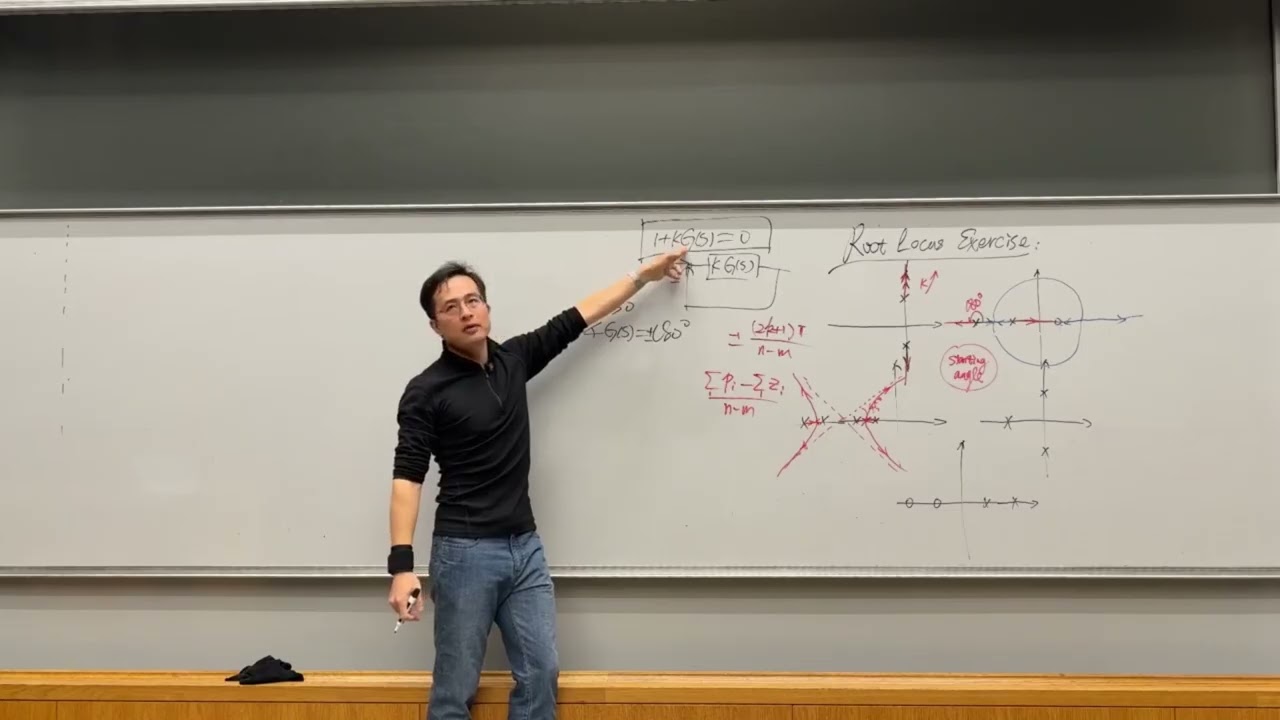
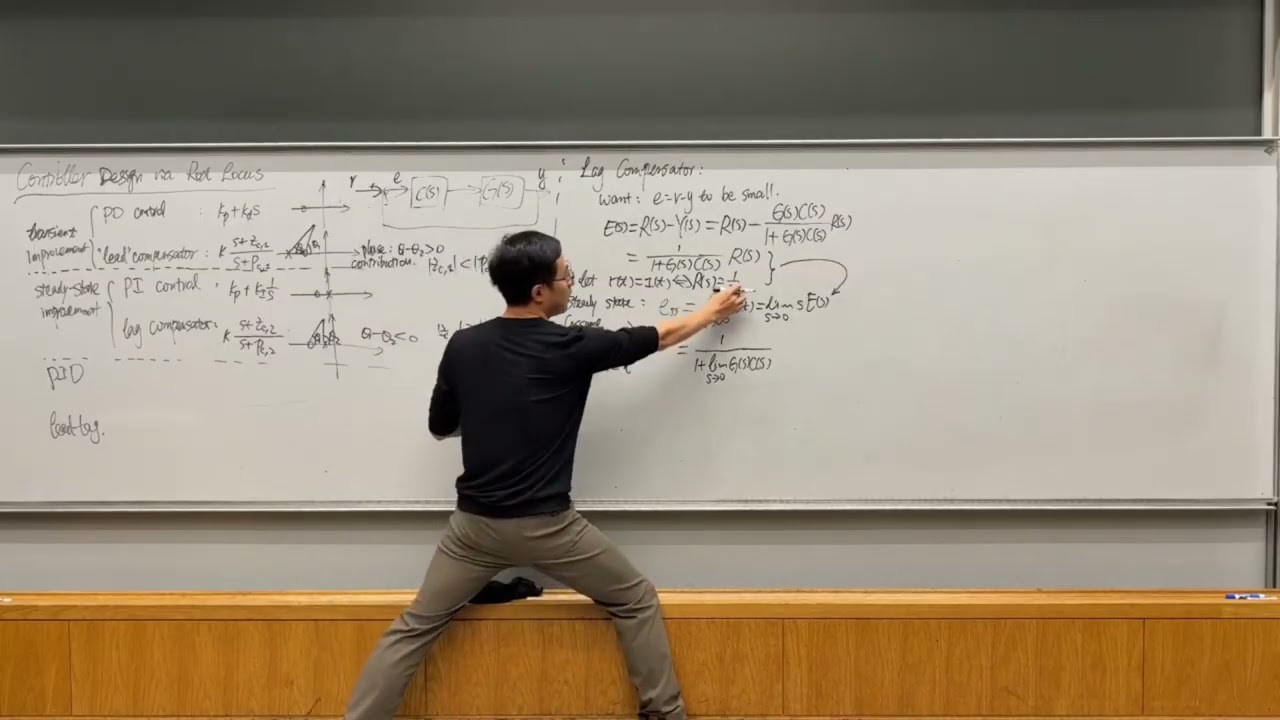
In this lecture, we bridge the gap between theoretical root locus construction and practical system behavior with lead-lag compensators. We explore the nuanced relationship between open-loop zeros and closed-loop performance, specifically focusing on why certain poles "behave" as dominant even when they are not the closest to the origin. We also dive into the "pole-zero cancellation" effect in lag compensator design, and conclude with a fascinating look at how unstable zeros—often viewed as a design hurdle—can be used to completely reject specific classes of infinite-magnitude signals. Key Learning Objectives: Mastering Root Locus construction for systems with lead-lag compensators. Understanding the mathematical vs. behavioral definition of "dominant poles." Identifying the conditions under which pole-zero cancellation fails. Exploring the unique signal-rejection properties of unstable zeros in advanced control design. Timestamps 00:00 – Introduction and motivating example: 2nd order system with Lead-Lag control. 00:59 – Step-by-step Root Locus construction and asymptote calculation. 03:22 – Identifying dominant poles: Mathematical vs. Behavioral perspectives. 04:12 – Detailed analysis of the closed-loop transfer function. 06:26 – The mechanics of Pole-Zero cancellation in Lag compensators. 08:10 – Why designs fail: When cancellation is no longer effective. 10:33 – Stability considerations: Why we avoid cancellation in the Right Half Plane (RHP). 11:58 – The "Hidden Power" of unstable zeros: Rejecting exponentially growing inputs. About the Channel: Gradual Growth 8 provides rigorous, first-principles engineering education focused on control systems, mechatronics, and robotics. Our goal is to bridge the gap between textbook theory and real-world deployment. #ControlSystems #RootLocus #RoboticsEngineering #LeadLagCompensator #LinearSystems #EngineeringEducation #FeedbackControl
Comments