RI Seminar: Greg Sawicki : Spring-loading human locomotion: Bio inspired lower-limb design скачать в хорошем качестве
RI Seminar: Greg Sawicki : Spring-loading human locomotion: Bio inspired lower-limb design
Трансляция закончилась 11 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: RI Seminar: Greg Sawicki : Spring-loading human locomotion: Bio inspired lower-limb design в качестве 4k
У нас вы можете посмотреть бесплатно RI Seminar: Greg Sawicki : Spring-loading human locomotion: Bio inspired lower-limb design или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон RI Seminar: Greg Sawicki : Spring-loading human locomotion: Bio inspired lower-limb design в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
RI Seminar: Greg Sawicki : Spring-loading human locomotion: Bio inspired lower-limb design
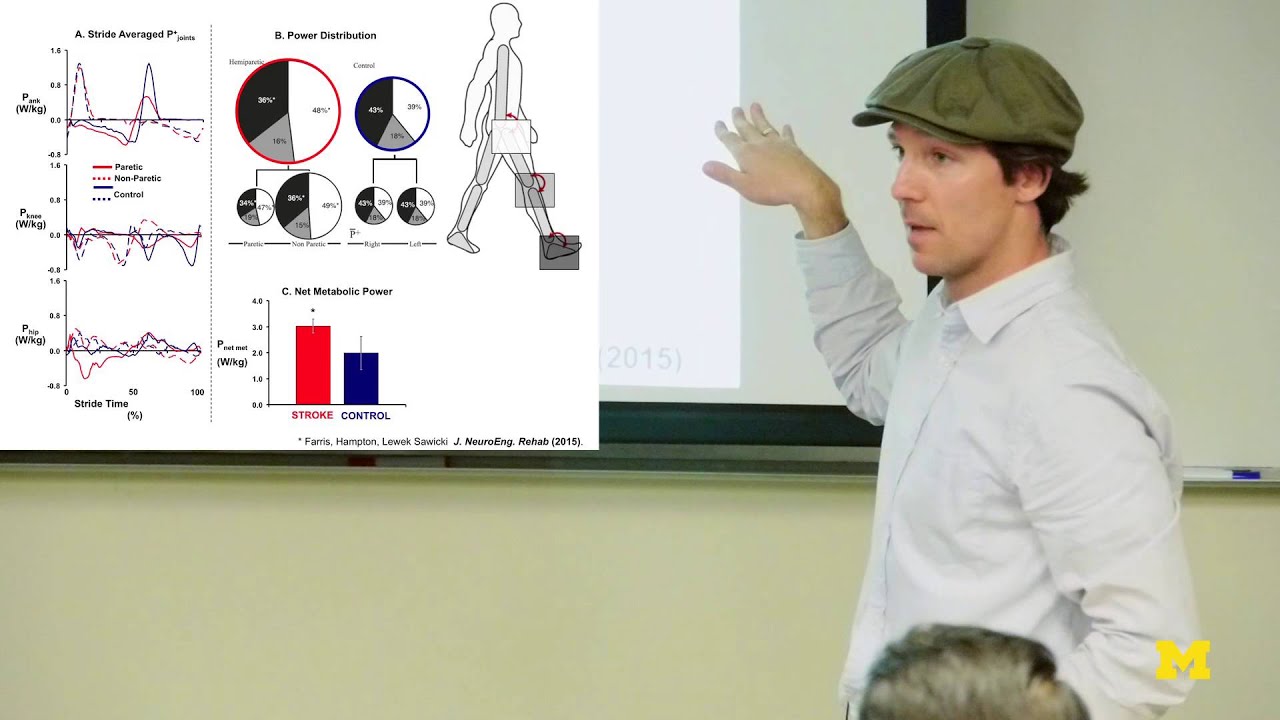
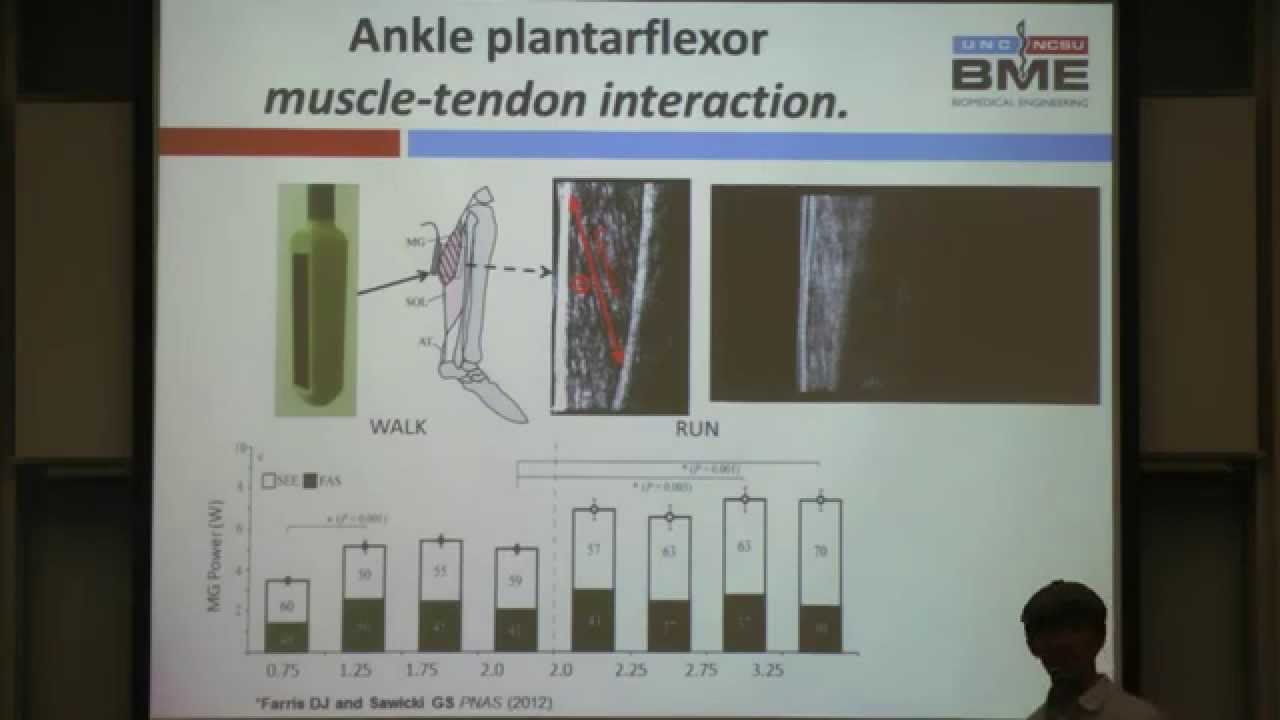
Greg Sawicki Assistant Professor of Biomedical Engineering, North Carolina State University Spring-loading human locomotion: Taking inspiration from biology to improve lower-limb exoskeleton design Abstract The goal of the Human Physiology of Wearable Robotics (PoWeR) Laboratory is to discover and exploit key principles of locomotion neuromechanics in order to build wearable devices that can augment intact and/or restore impaired human locomotion. The primary performance goal of such devices is to reduce metabolic energy consumption of the user. Our design approach is motivated by a key passive dynamic principle that is crucial to efficient movement- the effective cycling of mechanical energy from the body’s center of mass to elastic tissues (i.e. tendon and aponeurosis) and back. In humans, a crucial site of elastic energy storage and return is the compliant triceps surae-Achilles tendon muscle-tendon unit – whereby, during walking, an effective ‘catapult mechanism’ is achieved by finely ‘tuned’ coordination of muscle force output. This controlled energy storage and release in elastic structures decreases the input energy demands on underlying power sources in the system (i.e. the muscles) while providing large short bursts of mechanical energy to power the step-to-step transition. First, I discuss the motivation and basic science behind the design of a passive elastic exoskeleton and novel clutching mechanism that can reduce the musculoskeletal loads on plantarflexor muscles by storage and release of elastic energy in a parallel spring worn about the ankle (i.e. exo-tendon) during human walking. Then, I address a crucial question in the design of wearable assistive devices: How does a mechanical element (motor or spring) acting in parallel with biological muscle-tendon unit influence its underlying ‘tuned’ elastic behavior? I examine how parallel assistance (e.g. from an exoskeleton) alters muscle-tendon interaction using a simple, forward dynamics (i.e. predictive) model of the ankle plantarflexors during vertical hopping with exo-tendons. When possible, I compare model estimates of muscle dynamics (i.e. length, velocity trajectories) to human data using functional ultrasound images taken from the triceps surae muscles with and without exo-tendon assistance. Finally, I discuss how this simple modeling-experimental framework could be used to (1) optimize mechanical assistance in terms of the user’s energetic benefit, injury risk and adaptation time and (2) elucidate underlying mechanisms that may drive preferred behaviors during human movement. A common theme emerges: More is not always better. That is, there are potential side-effects to exoskeleton designs that maximize reductions in musculoskeletal loading by ‘turning up the dial’ on mechanical assistance. Speaker Biography Dr. Gregory S. Sawicki is an Assistant Professor in the Joint Department of Biomedical Engineering at North Carolina State University and the University of North Carolina at Chapel Hill. He received B.S. and M.S. degrees in Mechanical Engineering from Cornell University (1999) and the University of California-Davis (2001). Prior to his arrival at NC State in summer 2009, Dr. Sawicki completed his Ph.D. in Human Neuromechanics at the University of Michigan, Ann-Arbor (2007) and was an NIH-funded Post-Doctoral Fellow in Integrative Biology at Brown University (2007-2009). Dr. Sawicki’s research area is Rehabilitation Engineering. He directs the Human Physiology of Wearable Robotics (PoWeR) laboratory focusing on uncovering fundamental principles of locomotion mechanics, energetics and neural control in both healthy and impaired (e.g. stroke) populations. The long term vision of the Human PoWeR lab is to exploit useful principles of human locomotion- applying them to motivate bio-inspired designs for state of the art lower-limb exoskeletons prostheses.
Comments