Intro2Robotics Lecture 22c: Artificial Potential Fields for Robot Path Planning скачать в хорошем качестве
Intro2Robotics Lecture 22c: Artificial Potential Fields for Robot Path Planning
8 лет назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: Intro2Robotics Lecture 22c: Artificial Potential Fields for Robot Path Planning в качестве 4k
У нас вы можете посмотреть бесплатно Intro2Robotics Lecture 22c: Artificial Potential Fields for Robot Path Planning или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон Intro2Robotics Lecture 22c: Artificial Potential Fields for Robot Path Planning в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
Intro2Robotics Lecture 22c: Artificial Potential Fields for Robot Path Planning
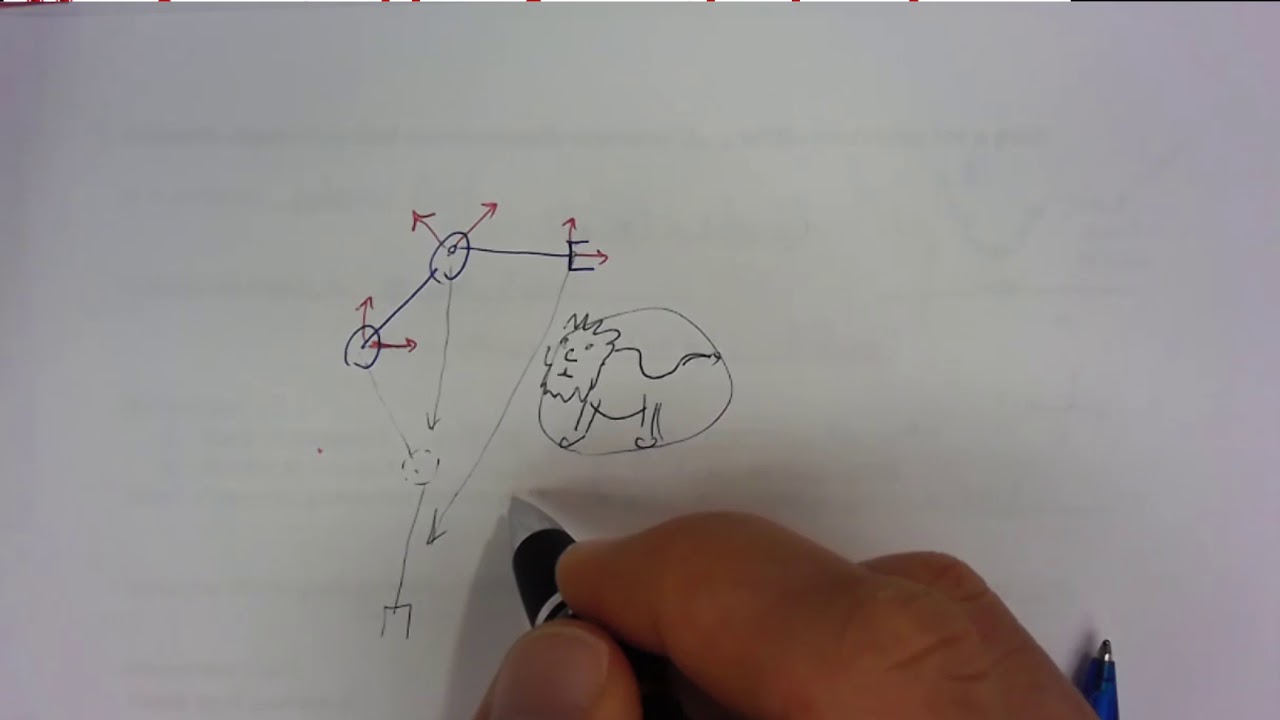
Lecture 22, part 3 of 3 1. • Intro2Robotics Lecture 22a: Path-planning,... Path planning with a 2-link robot 2. • Intro2Robotics Lecture 22b: Breadth-First ... Breadth First Search 3. • Intro2Robotics Lecture 22c: Artificial Pot... Artificial Potential Fields Artificial Potential Fields are a search algorithm that incrementally explores Q_free while searching for a path. Why? 1. Hard to construct potential field in configuration space 2. Harder to compute the gradient of field on config space Instead, we will use workspace potential fields to attract origins of DH frames to goal locations while repelling them from obstacles. This lecture shows how to construct potential wells that attract the robot to a goal: conic wells, parabolic wells, and a combination of the two. Next it shows how to construct a repulsive force that repels robot from obstacles, never allow robot to collide with obstacle, and exerts little to no influence if robot is far away from this. The solution approaches infinity as approach obstacle, and decreases to zero at a specified distance. Errata: At 22:15 in the Urep equation, the whole parenthesis should be squared. 00:00 - A control law for path planning
Comments