How a Self Driving Car Sees скачать в хорошем качестве
How a Self Driving Car Sees
11 дней назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: How a Self Driving Car Sees в качестве 4k
У нас вы можете посмотреть бесплатно How a Self Driving Car Sees или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон How a Self Driving Car Sees в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
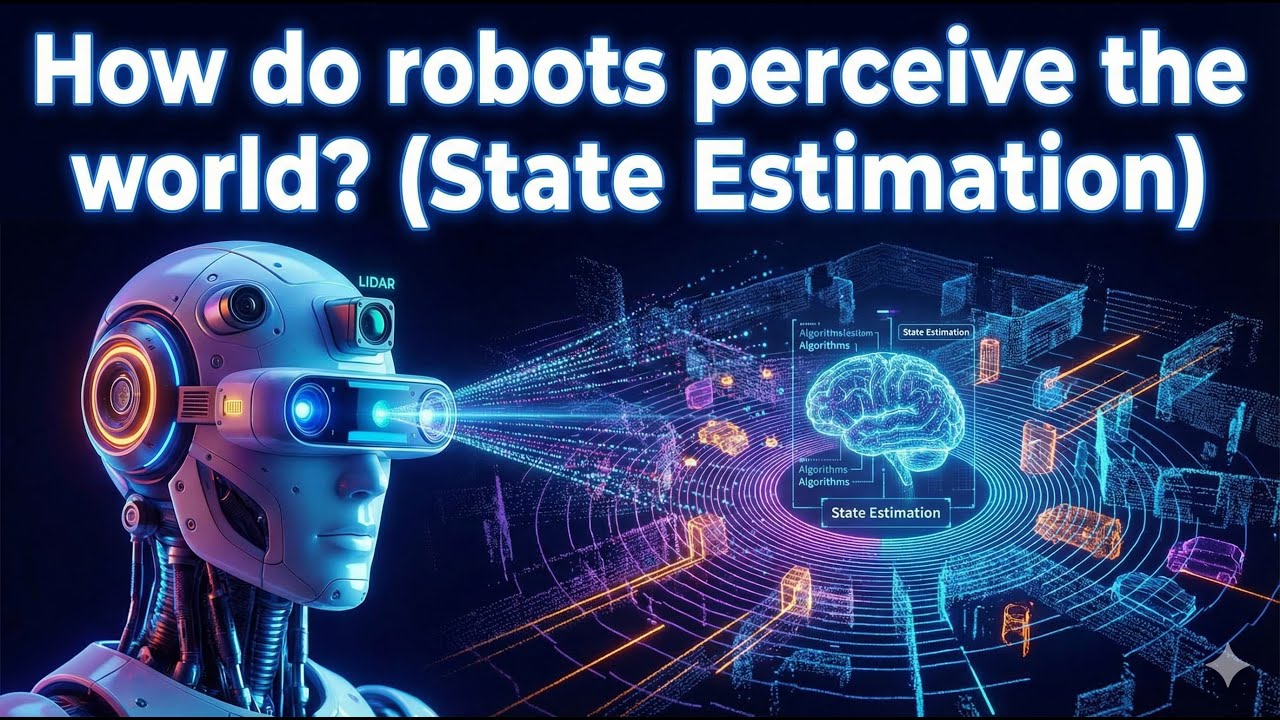
How a Self Driving Car Sees
This video explores the core principles of SOTIF (Safety of the Intended Functionality) through a deep dive into autonomous vehicle perception systems. Achieving safety in self-driving cars requires more than just avoiding system failures (Functional Safety); it requires addressing Functional Insufficiencies and Performance Limitations of sensors in diverse environmental conditions. We analyze how the "Sensor Team"—comprising Cameras, LiDAR, and Radar—works together through Sensor Fusion to mitigate risks and handle "Unknown Unsafe" scenarios. Key Topics Covered: The relationship between sensor performance (Range, Resolution, Accuracy) and SOTIF. How environmental factors like fog, rain, and lighting impact perception. The role of Sensor Fusion in achieving a safe Operational Design Domain (ODD). #SOTIF #ISO21448 #AutonomousDriving #FunctionalSafety #SensorFusion #SelfDrivingCars #ADAS
Comments