[논문 리뷰] From Coarse to Fine : Robust Hierarchical Localization at Large Scale скачать в хорошем качестве
[논문 리뷰] From Coarse to Fine : Robust Hierarchical Localization at Large Scale
2 года назад
Не удается загрузить Youtube-плеер. Проверьте блокировку Youtube в вашей сети.
Повторяем попытку...
Повторяем попытку...
![[논문 리뷰] From Coarse to Fine : Robust Hierarchical Localization at Large Scale](https://imager.clipsaver.ru/rTmXeHCvt3U/max.jpg)
Скачать видео с ютуб по ссылке или смотреть без блокировок на сайте: [논문 리뷰] From Coarse to Fine : Robust Hierarchical Localization at Large Scale в качестве 4k
У нас вы можете посмотреть бесплатно [논문 리뷰] From Coarse to Fine : Robust Hierarchical Localization at Large Scale или скачать в максимальном доступном качестве, видео которое было загружено на ютуб. Для загрузки выберите вариант из формы ниже:
-
Информация по загрузке:
Скачать mp3 с ютуба отдельным файлом. Бесплатный рингтон [논문 리뷰] From Coarse to Fine : Robust Hierarchical Localization at Large Scale в формате MP3:
Если кнопки скачивания не
загрузились
НАЖМИТЕ ЗДЕСЬ или обновите страницу
Если возникают проблемы со скачиванием видео, пожалуйста напишите в поддержку по адресу внизу
страницы.
Спасибо за использование сервиса ClipSaver.ru
[논문 리뷰] From Coarse to Fine : Robust Hierarchical Localization at Large Scale
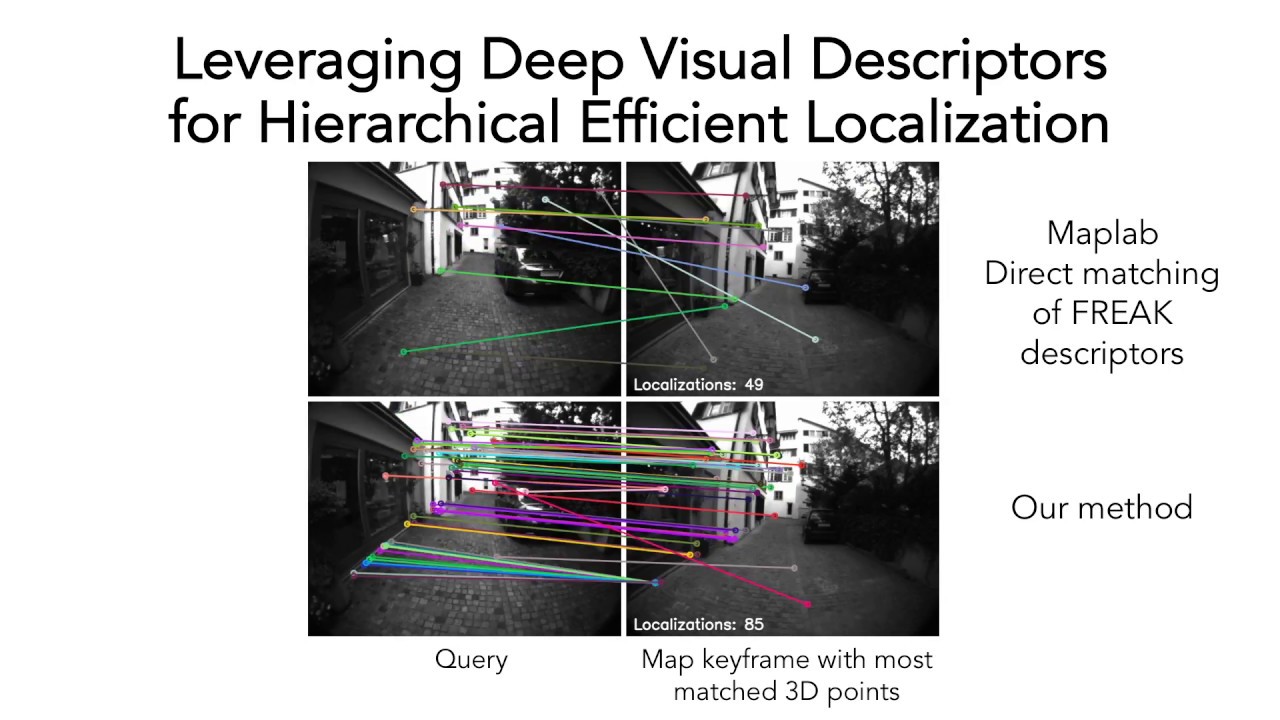
논문 주소 : https://arxiv.org/abs/1812.03506 이번 영상에서 소개드릴 논문은 From Coarse to Fine : Robust Hierarchical Localization at Large Scale입니다. 해당 논문은 컴퓨터비전 최고학회인 CVPR, 2019년에 나온 논문입니다. 이 논문에서 다루고 있는 문제는 Visual Localization입니다. Visual Localization은 3D Map을 활용하여 이와 같이 입력 이미지의 위치와 방향을 계산하는 하는 것입니다. 이렇게 현재 입력이미지의 위치와 방향을 정확하게 알고 있으면, 이러한 증강현실이나 로보틱스에서 활용할 수 있습니다. 이러한 Visual Localization을 통해서 카메라 포즈를 찾는 기법은 오차범위가 cm단위로 매우 정확한데요. GPS같은 경우는 방향정보가 없을 뿐만아니라 오차범위가 평균 5m정도이고 특히, 빌딩 숲같은 도심지역에서는 최대 50m까지 오차가 발생할 수 있습니다. 그리고 실내 같은 경우에는 GPS가 거의 안되기 때문에 이런 Visual Localization이 매우 중요한 기술입니다. #VisualLocalization #CameraPoseEstimation #AR #VR #Robitics #Robot #ComputerVision #Geometry #AI #DeepLearning #MachineLearning ##컴퓨터비전 #keypoint #featurematching #feature #superpoint #netvlad #기하학 #인공지능 #딥러닝 #머신러닝 #증강현실 #가상현실 #로봇 #로보틱스
Comments
![[논문리뷰] Efficient Large-scale Localization by Global Instance Recognition](https://imager.clipsaver.ru/4lLTepMqGGc/max.jpg)
![[논문리뷰]NeRF : Representing Scenes as Neural Radiance Fields for View Synthesis](https://imager.clipsaver.ru/dyGCqLLBz50/max.jpg)




![[논문 리뷰] Instant Neural Graphics Primitives with a Multi-resolution Hash Encoding](https://imager.clipsaver.ru/EYWHjrW-Xoo/max.jpg)


![[논문리뷰]MoCo(Momentum Contrast for Unsupervised Visual Representation Learning)](https://imager.clipsaver.ru/mGroma3gcgE/max.jpg)
![코스피가 1만 간다고…? 근거가 뭘까 | 나탈리 허 변호사 [신과대화]](https://imager.clipsaver.ru/Eri4tfxMvRg/max.jpg)


![[논문리뷰] PoseNet (2015)](https://imager.clipsaver.ru/QLQ3HEWIN0M/max.jpg)

![[🔴01/29 #당잠사] 1월 FOMC 기준금리 ‘동결’ | ASML·마이크로소프트·테슬라·메타 빅테크 실적발표 | #엔비디아 #인텔 #금](https://imager.clipsaver.ru/b6ZmJrBnTTs/max.jpg)
